1. 研究背景
热电式电子皮肤是机器人触觉感知和人机交互领域的核心技术之一,能够模拟人体皮肤的温度检测、热痛觉预警等仿生功能。然而,受热电器件固有的接触面积效应影响,传感信号易出现辨识失真问题。器件电学输出由整体热通量决定,致使局部高温刺激与大范围低温刺激产生的电信号难以区分,最终造成热损伤风险评估结果可信度不足,极大限制了现有热电感知电子皮肤在智能机器人、穿戴式器件及仿生假肢系统中的应用。与此同时,传统热电传感器仅可采集瞬时温度对应的电信号,不能直观表征热损伤的空间分布特征,很难兼顾仿生皮肤所需的热痛预警、损伤区域可视化两大核心性能。因此,研发兼具双重仿生特性的新型电子皮肤 —— 既可依托类真皮伤害感受器快速输出痛觉电信号、实现即时预警,又能借助类表皮显色变化直观标记受损区域,已然成为该领域亟需攻克的重难点课题。
2. 文章概述
近日,深圳大学材料学院陈光明教授、杜春雨副研究员课题组与中国科学院大学郭存悦教授课题组合作,开发了一种热电/聚集诱导发光(AIE)双模态双层电子皮肤,通过热电层与光致发光层的协同耦合,从根本上破解了接触面积效应导致的信号歧义,并首次在单一器件中实现了实时热损伤可视化、精准温度识别(准确率>97%)及仿生热痛觉感知。
在该工作中,作者受人体皮肤分层结构的启发,设计了仿生双层结构:底层为基于单壁碳纳米管(SWCNT)与四溴四苯乙烯(4BrTPE)复合的热电层,模拟真皮层伤害感受器,将温度梯度快速转化为电压的“痛觉”信号;顶层为4BrTPE/热塑性聚氨酯(TPU)光致发光层,模拟表皮层热损伤后的红肿,通过温度依赖的光致发光猝灭效应,直接以光学方式映射热源接触区域的空间分布。这种“电信号预警+光学成像定位”的协同策略,无需复杂算法即可实现温度与接触面积的直接解耦。
中国科学院大学博士研究生霍炳臣和邝凤霞为论文第一作者,中国科学院大学郭存悦教授/深圳大学杜春雨副研究员与陈光明教授为论文通讯作者。本研究获得了国家自然科学基金、广东省基础与应用研究项目和深圳市科技计划项目的资助。
3. 图文导读
作者提出了一种兼具仿生热痛觉感知、实时损伤可视化与接触面积解耦的双模态电子皮肤新策略。通过将AIE分子4BrTPE协同引入热电层与发光层,实现了其在器件内部的分子尺度均匀分散,并有效调控了发射光谱红移及界面能量过滤行为。上层光致发光(PL)层基于热致发光猝灭效应,可实现不受接触面积影响的可视化温度映射;下层热电层则借助界面能量过滤效应获得高灵敏度电压响应。由此,双层功能结构实现了温度感知、电信号输出与光学可视化的协同耦合,构建出“感知—响应—可视化”一体化的仿生闭环体系。图1给出了仿生双模态电子皮肤的设计原理与应用示意图。
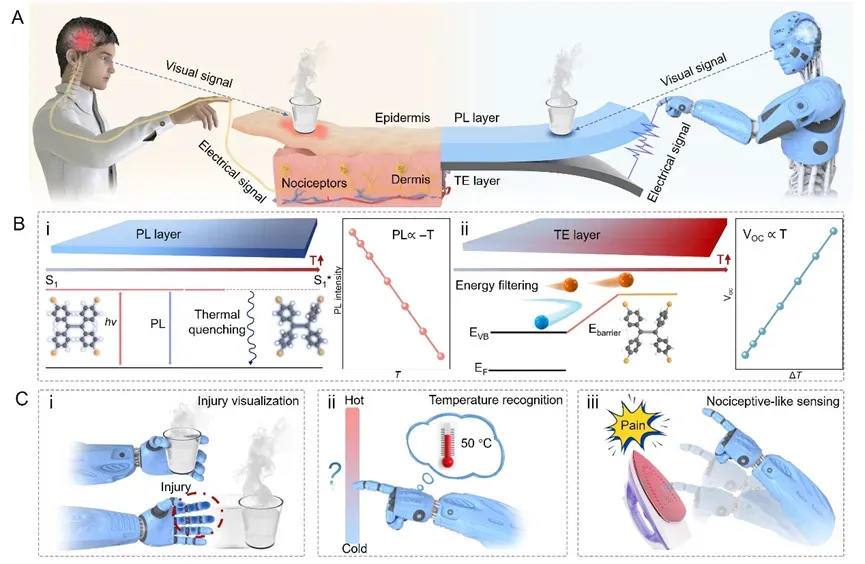
图1 仿生双层电子皮肤的设计原理与应用示意图。
图2是4BrTPE/TPU光致发光层与4BrTPE/SWCNT热电层的性能表征结果。CIE色度图分析表明,4BrTPE/TPU薄膜的发射光谱显著红移至绿光区域,有效规避了生物自发荧光背景干扰。傅里叶变换红外光谱(FTIR)证实了Br−Br卤键相互作用的存在,以及聚合物基体对分子内旋转运动的约束效应。温度依赖发射光谱测试结果显示,4BrTPE/TPU薄膜在−30°C至75°C温度区间内呈现出优异的线性响应特性;经500次热循环老化测试后,其光信号衰减率仅为15%,展现出良好的热稳定性与可逆性。热电性能方面,4BrTPE的引入在SWCNT网络中建立了0.41 eV的界面能量过滤势垒,使Seebeck系数提升至55 μV K−1,功率因子达165 μW m−1 K−2,热电优值(ZT)较纯SWCNT薄膜提升20倍。
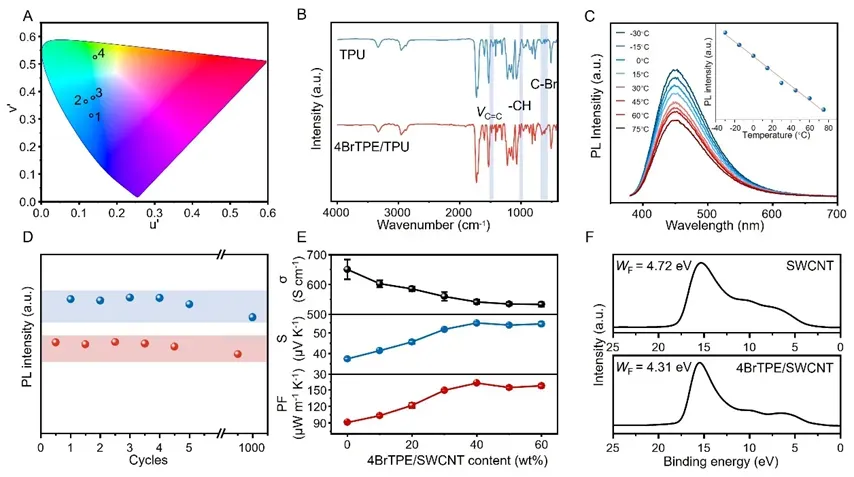
图2 光致发光层与热电层的性能表征。
图3给出了电子皮肤仿生热痛觉特性的结果。在50°C(热痛阈值)时输出电压为1.25 mV,60°C(烧伤阈值)时达1.75 mV,呈现出清晰的危险等级区分能力。非适应性测试中,多次60°C刺激下电压输出稳定在1.90 mV,信号漂移低于1.5%,成功模拟了生物伤害感受器的持续警觉特性。双向感知方面,系统在60°C热刺激与−10°C冷刺激间切换时均保持稳定电压输出,恢复时间均小于30秒。尤为重要的是,通过PL层的光学面积映射,系统成功区分了75°C小面积接触与45°C大面积接触产生的相似电压信号,从根本上消除了传统单模态热电传感器的面积歧义。
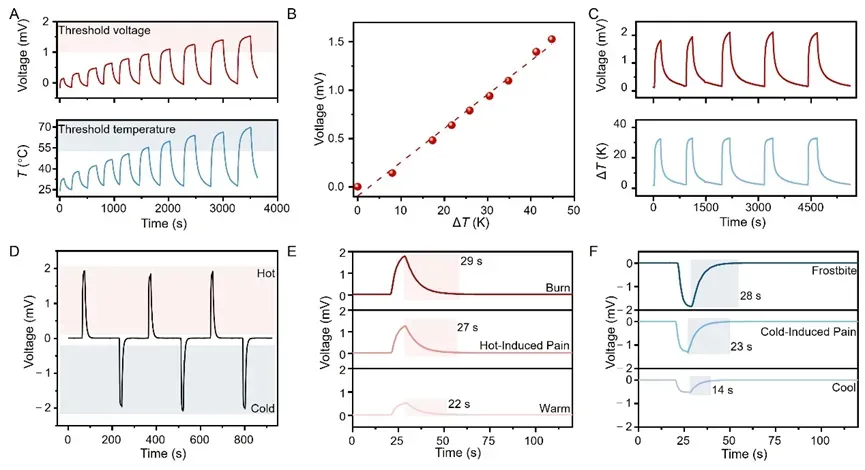
图3 电子皮肤的仿生热痛觉特性。
基于上述双模态电子皮肤,研究团队进一步构建了仿生反射弧控制系统(图4)。当机械臂指尖电子皮肤接触35°C热源时,电压低于1 mV阈值,系统保持正常接触;接触50°C热源时,4.4 s内触发保护性回缩反射,同时发光层明显变暗,模拟“热致疼痛”与"组织损伤"的同步响应;接触60°C热源时,回缩时间缩短至2.2 s,发光猝灭更为显著,实现了危险等级与响应强度的正相关。该系统还具备双向感知能力,可同步识别−10°C冻伤与60°C烫伤,完整复现了生物皮肤的“感知-评估-反射”闭环。
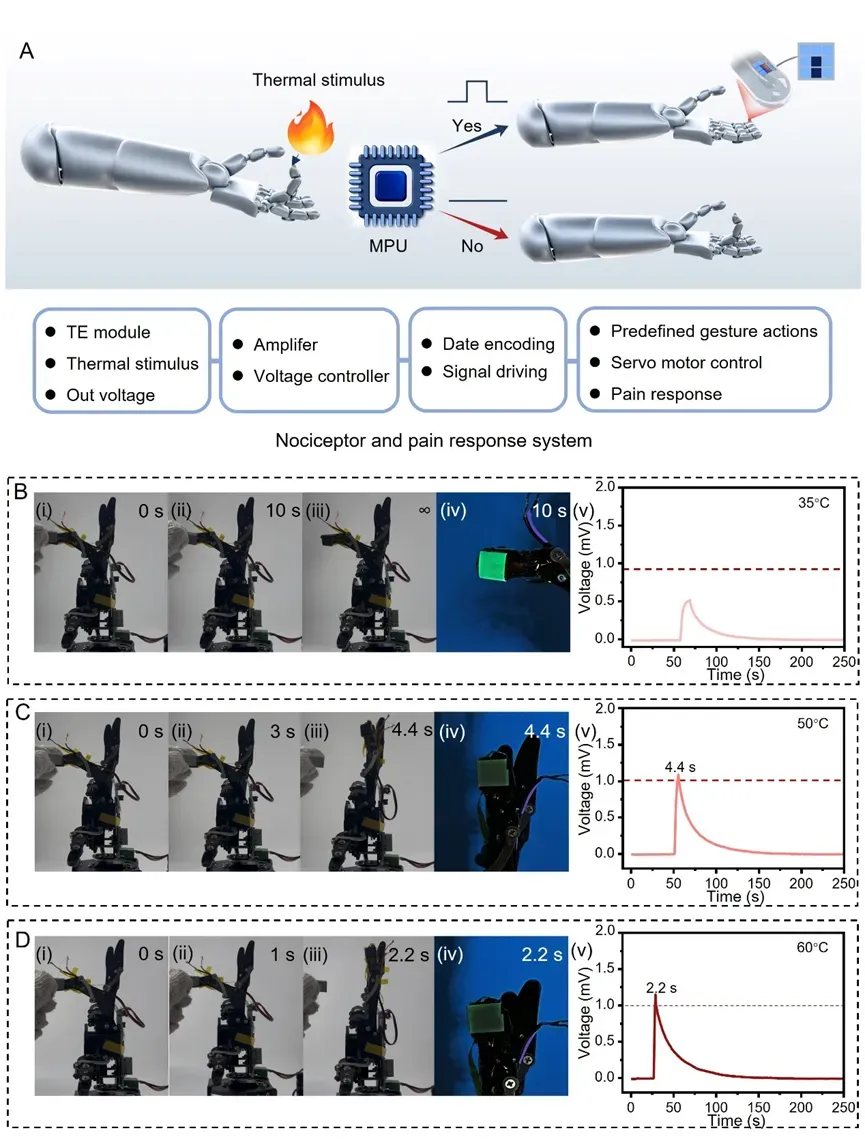
图4 仿生伤害感受器与疼痛响应系统。
为验证面积解耦策略的普适性与空间分辨能力,研究团队建立了3×3阵列化双模态感知平台(图5),提出了“电压-发光面积”解耦模型(ΔT= (AₘₐₓV)/(SA))。通过光学成像实时提取接触面积A,结合热电电压V,可直接计算出真实温度梯度。实验表明,即使面对不规则“H”形热源,系统对烧伤、热致疼痛、冷致疼痛、冻伤四种状态的识别准确率仍超过97%,混淆矩阵显示各类别误判率均低于3%。该结果从根本上证明了双模态协同策略在复杂接触几何条件下的鲁棒性与可靠性。
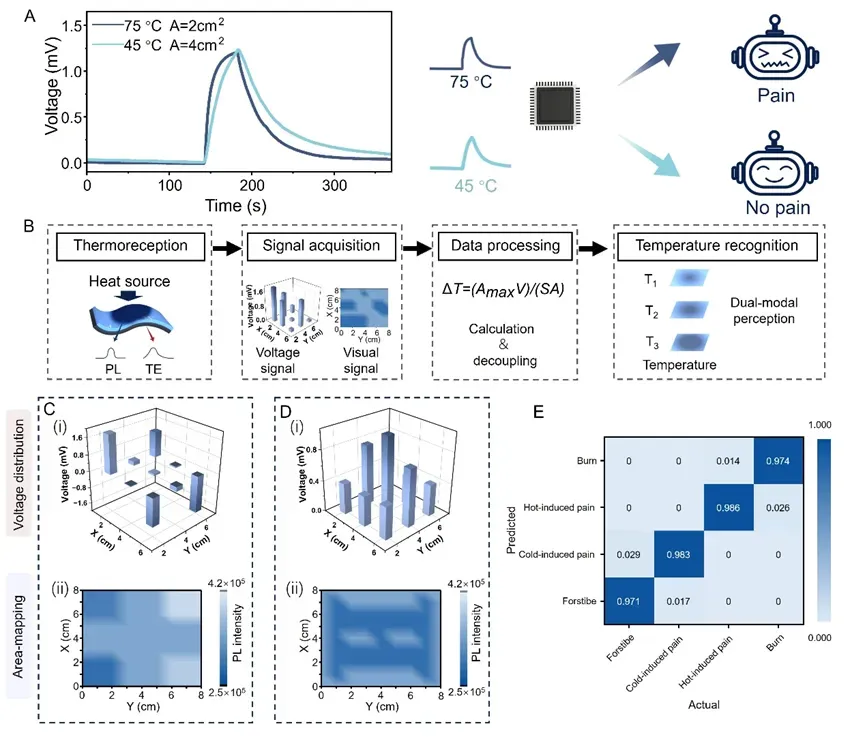
图5 阵列化双模态电子皮肤系统。
4. 结论
作者成功开发了一种仿生热电/AIE双模态双层电子皮肤,通过热电层与光致发光层的协同耦合,从根本上解决了热电式电子皮肤长期面临的接触面积歧义难题。该电子皮肤在−10°C至60°C宽温域内保持双向高灵敏感知,信号恢复时间小于30 s,温度识别准确率超过97%,并通过仿生反射弧控制系统验证了其在智能机器人安全交互中的实用性。该研究为下一代软体机器人、人机交互界面及先进假肢系统的智能安全防护提供了兼具实时性与可靠性的解决方案,推动了电子皮肤从“信号报告”向“确定性感知”的概念跃迁。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
