在仿生传感技术快速发展的背景下,电子皮肤在压力、温度和应变检测方面取得了显著进展,使人类与机器的交互、软体机器人和智能假肢更接近生物性能。然而,现有的热敏伤害感受电子皮肤大多仅依赖电信号输出,难以提供关于热损伤空间分布和累积程度的充分信息。尤其值得关注的是,柔性热电材料虽然能将温度梯度直接转换为电压信号,但其大面积应用面临一个关键瓶颈:热源接触面积的变化会导致输出电压显著偏差,产生“面积诱导的模糊性”——一个小面积的高温刺激与一个大面积的温和温度刺激可能产生完全相同的电信号,仅凭电压无法区分二者。此外,传统热传感器通常检测瞬时温度,而组织损伤程度却由温度和暴露时间共同决定,这使得现有电子皮肤难以同时感知疼痛和评估损伤。
为解决上述挑战,深圳大学陈光明教授、杜春雨副研究员和中国科学院大学郭存悦副教授合作开发了一种双模态双层电子皮肤,集成了基于单壁碳纳米管的热电层和基于聚集诱导发射发光体的光致发光层。底层的热电层作为快速响应的伤害感受器,将温度梯度转换为电压编码的“疼痛”信号;顶层的AIE层则通过光致发光猝灭提供与接触面积无关的热场光学映射,无需复杂计算即可直接解耦温度与接触面积。该集成平台实现了实时损伤可视化、超过97%的高精度温度识别以及可靠的类伤害感受传感功能,并经仿生机器人反射系统验证,为动态热环境下的智能安全保护和增强人机交互提供了稳健的解决方案。相关论文以“Bimodal Thermoelectric/AIE E-Skin Decouples Contact-Area Ambiguity for Concurrent Pain Perception and Injury Mapping”为题,发表在Advanced Materials上。
仿生设计与双层结构
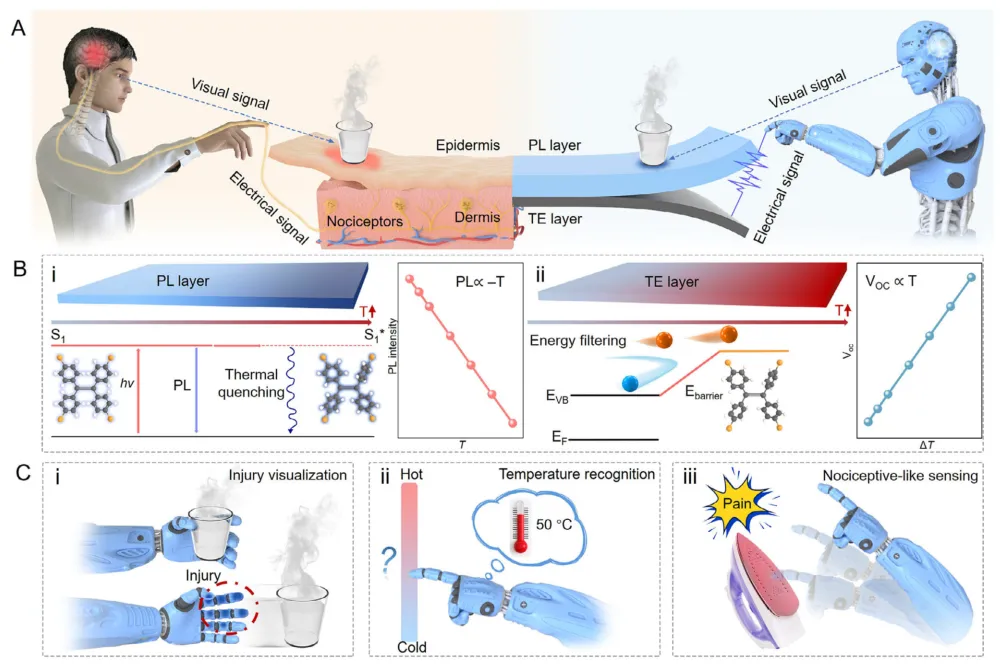
受人体皮肤热损伤时表皮出现红斑和肿胀、真皮伤害感受器产生电信号的生物机制启发,研究团队设计了一种仿生双层电子皮肤。顶部光致发光层由4BrTPE/TPU复合材料构成,基于聚集诱导发射机制,通过热诱导的光致发光猝灭来模拟损伤后的红斑,并能精准记录热源的空间接触足迹。底部热电层则采用4BrTPE/SWCNT复合材料,利用热电效应模拟伤害感受器在热刺激下的电信号产生过程,同时通过能量过滤效应增强传感灵敏度。这种分层结构完整地再现了皮肤对热损伤的整合响应,实现了表皮空间可视化与真皮时间传感的有机统一。
图1 | 仿生双层电子皮肤及应用的示意图 (A)电子皮肤的生物启发热伤害感受器结构。 (B)(i)光致发光层温度依赖的PL强度机制。(ii)热电层温度依赖的电压响应和能量过滤效应示意图。 (C)电子皮肤的应用场景:(i)损伤可视化;(ii)温度识别;(iii)类伤害感受传感。
光致发光层的温度传感性能
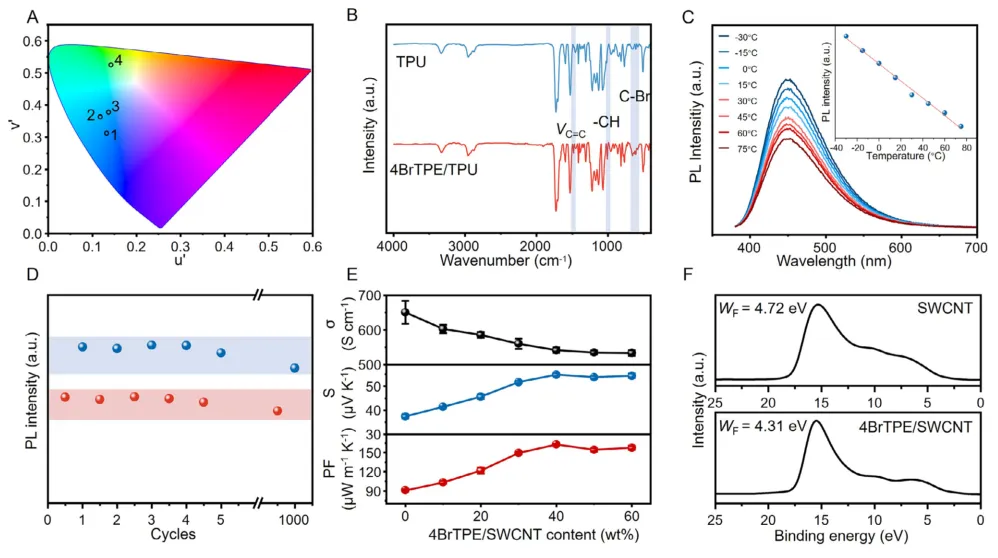
研究团队对AIE材料4BrTPE/TPU薄膜的光致发光性能进行了系统表征。CIE色度图显示,与TPE相比,4BrTPE的引入使发光产生显著红移,从蓝色区域移至绿色富集区域,这得益于溴原子介导的超分子相互作用实现了分子级均匀分散。在-30°C至75°C的温度范围内,该薄膜的PL强度呈现显著的温度依赖性,随着温度升高逐渐衰减,而发射波长保持稳定。450 nm处的发射强度与温度之间表现出优异的线性关系,适合定量热传感。经过500次连续加热-冷却循环后,PL强度仍保持初始值的约85%,仅衰减15%,表明TPU基质有效稳定了4BrTPE分子,即使在长期热应力下也能保持分子内旋转受限效应。实际图案测试表明,与红外热成像相比,PL成像能提供更精细的空间信息,且在潮湿、降水、太阳辐射等恶劣环境条件下具有更强的抗干扰能力。
热电层的性能优化与机械稳定性
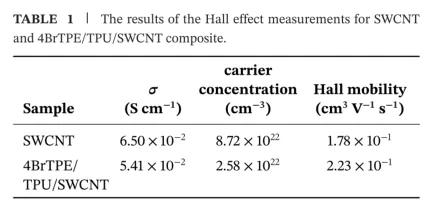
热电性能对热伤害感受器的灵敏度至关重要。研究显示,随着4BrTPE含量的增加,电导率先降低后在40 wt.%以上稳定在550 S/cm,而塞贝克系数在相同组成下达到55 μV/K。这一热电增强是四溴取代结构特有的分子特异性现象,与溴化程度精确相关。热导率从原始SWCNT薄膜的27 W/m·K大幅降至复合材料的2.4 W/m·K,结合优化的功率因子,使热电优值ZT从0.001提升至0.02,提高了20倍。UPS和DFT计算证实,4BrTPE的引入建立了0.41 eV的界面能垒,选择性抑制低能载流子的输运,从而有效提高塞贝克系数。在机械性能方面,4BrTPE/TPU/SWCNT复合材料的断裂应变提升至16%、应力达14 MPa,且在10 K固定温度梯度下连续拉伸时,输出电压稳定保持在约0.5 mV直至断裂点,表明热电信号与机械形变有效解耦。经过500次拉伸循环和1000次快速加热-冷却循环后,材料性能衰减小于5%,展现出优异的长期耐久性。
图2 | TPE衍生物薄膜的光致发光和热电性能 (A)TPE衍生物薄膜的CIE色度图。标签对应:(1)TPE,(2)4BrTPE,(3)TPE/TPU复合薄膜,(4)4BrTPE/TPU复合薄膜。 (B)TPU和4BrTPE/TPU薄膜的FTIR光谱。 (C)4BrTPE/TPU薄膜在450 nm激发波长下的温度依赖发射光谱。 (D)4BrTPE/TPU薄膜在450 nm处的PL强度与不同温度的关系。 (E)4BrTPE/TPU薄膜的热电参数。 (F)SWCNT和4BrTPE/SWCNT的UPS光谱。
仿生伤害感受特征
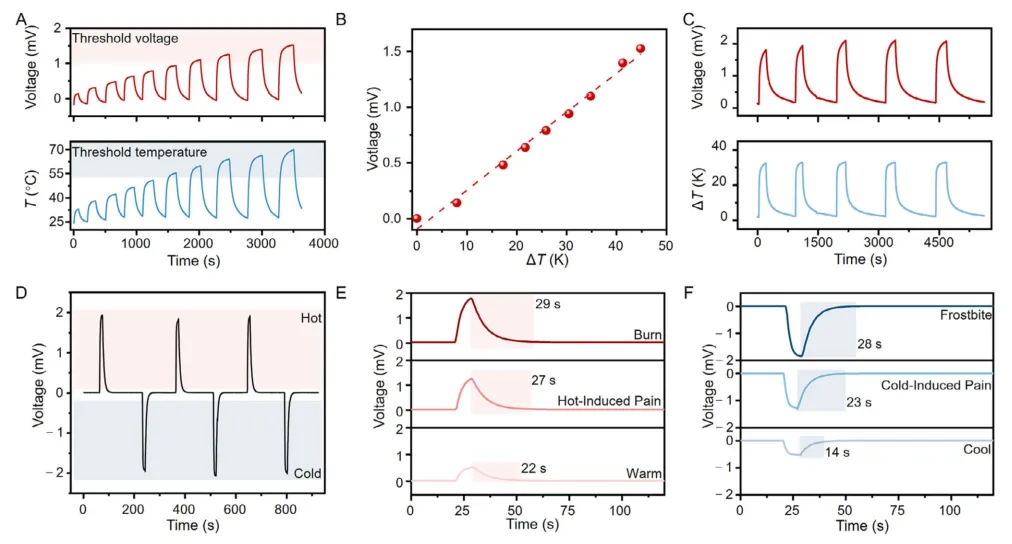
研究团队系统评估了热电层对生物伤害感受关键特征的模拟能力。在热痛阈值方面,该电子皮肤在50°C(ΔT=25 K)时产生1.25 mV的输出电压,在60°C(ΔT=35 K)时产生1.75 mV的输出电压,0.50 mV的明确差异实现了对安全与危险热条件的清晰区分,且输出与温度呈强线性关系。在非适应性方面,当反复受到60°C热源刺激时,复合材料电子皮肤在多周期内保持稳定的1.90 mV电压输出,信号漂移低于初始值的1.5%,成功模拟了生物热伤害感受器对持续有害刺激的持续警觉特性。在双向感知方面,该电子皮肤在60°C热源和-10°C冷源交替刺激下均能保持稳定电压输出,功能性地模拟了冷伤害感受器。在恢复时间方面,对于35°C和15°C的中等刺激,平均恢复时间为12-15秒;即使对于60°C和-10°C的极端条件,恢复时间也保持在30秒以内(平均25-28秒),确保了高频机器人传感任务的快速响应能力。
图3 | 伤害感受特征 (A)热伤害感受阈值特征。 (B)温差与电压之间的线性关系。 (C)电子皮肤在60°C(环境温度25°C)下的非适应特征。 (D)60°C和-10°C下的输出电压(环境温度25°C)。 (E)35、50和60°C下的恢复时间(环境温度25°C)。 (F)15、0和-10°C下的恢复时间(环境温度25°C)。
仿生反射弧与机器人集成
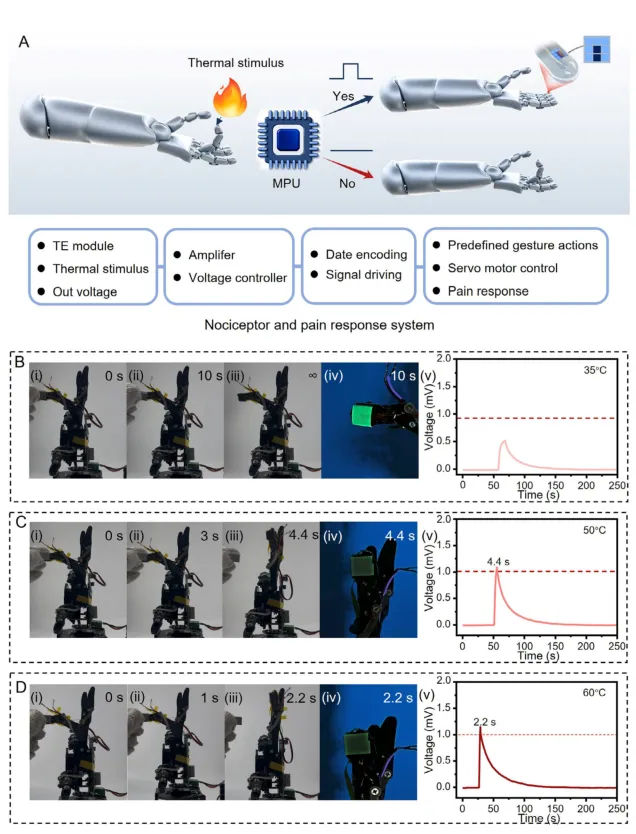
为展示实际应用能力,研究团队构建了一个集成了机器人操纵臂的仿生反射控制系统。预设电压阈值为1 mV(对应ΔT≈20°C),低于此阈值为无害刺激,高于此阈值则微控制器立即触发机械臂回缩指令。在35°C无害接触下,产生的0.5 mV电压低于阈值,机械臂保持接触,PL强度保持稳定。在50°C痛阈刺激下,电压超过1 mV阈值,机械臂在4.4秒延迟后触发保护性回缩反射,同时PL强度显著减弱,视觉模拟了组织损伤的起始。在60°C烧伤危险刺激下,回缩反射仅需2.2秒即可触发,响应时间缩短了一半,有效减少了对严重危害的暴露时间,同时PL层表现出显著猝灭,在指尖留下清晰的“损伤”严重程度视觉记录。在冷刺激验证中,0°C冷冻刺激在4.9秒触发回缩反射,-10°C刺激的响应时间缩短至2.1秒。50次独立试验的统计分析显示,反射潜伏期与热偏差幅度呈明确的反比关系,证实了该伤害感受系统的高灵敏度和确定性逻辑。
图4 | 伤害感受器与疼痛响应系统 (A)机械臂仿生伤害感受反射控制系统的示意图。 (B)35°C热刺激接触电子皮肤模块后,机械臂食指的状态、PL图像和产生的电压信号。 (C)50°C热刺激接触电子皮肤模块后,机械臂食指的状态、PL图像和产生的电压信号。 (D)60°C热刺激接触电子皮肤模块后,机械臂食指的状态、PL图像和产生的电压信号。
双模态集成解耦策略
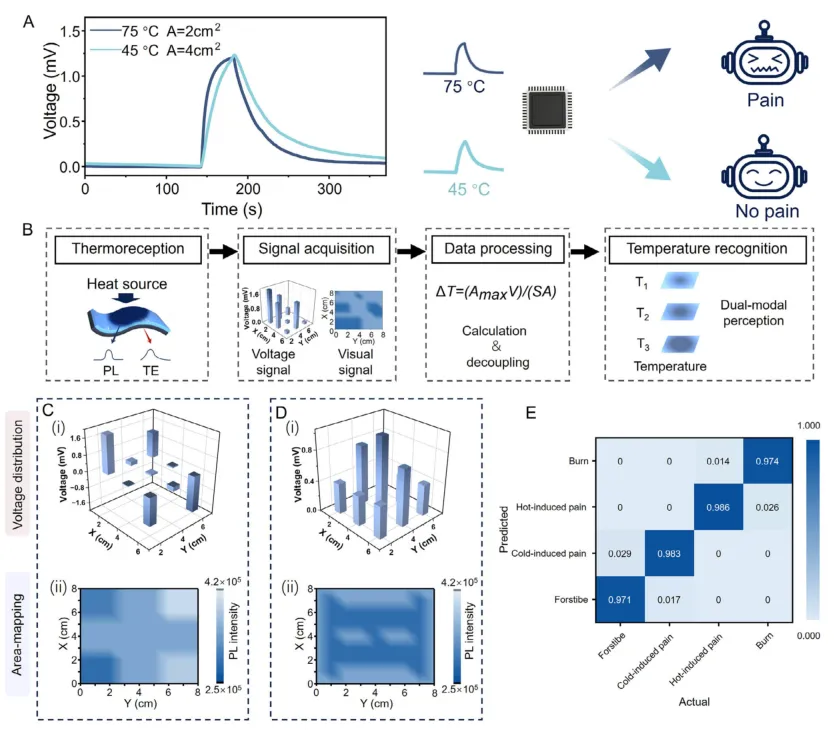
热电装置输出电压受总热通量控制,而总热通量高度依赖于有效接触面积,这导致了关键的“多对一”映射问题:大接触面积的温和刺激可能产生与小面积危险刺激相当甚至更高的电压信号。为从根本上解决这一问题,研究团队建立了线性控制模型:ΔT = (A_max·V)/(S·A),其中A_max为校准的总模块面积,V为测量电压,S为塞贝克系数,A为从PL荧光映射中提取的实时接触面积。该模型通过不同温度和接触几何形状的热刺激得到严格验证。在3×3像素化电子皮肤阵列的演示中,对于相同接触面积但不同温度的热源,原始电压变化很大,但利用PL图像导出的接触面积映射,计算得到的温度与真实温度高度吻合。对于不规则的H形热源,系统在60°C(烧伤)、50°C(热痛)、0°C(冷痛)和-10°C(冻伤)四个关键温度区间的50次试验中,识别准确率超过97%。这表明电信号与空间分辨光学反馈的融合有效消除了单模传感器中固有的面积诱导信号模糊性。
图5 | 接触面积与热刺激的解耦策略 (A)不同接触面积和温度下热电电压信号的示意图。 (B)基于热电(TE)和光致发光(PL)双模态耦合的温度映射过程。 (C)(i)不同温度刺激的电压信号。(ii)不同温度刺激的PL图像。(iii)不同温度刺激的温度映射。 (D)(i)来自60°C热源的电压信号。(ii)来自60°C热源的提取温度映射。(iii)光致发光图像。 (E)热刺激识别的混淆矩阵。
总结与展望
综上所述,该双模态电子皮肤从根本上克服了热电传感中长期存在的接触面积模糊性挑战。通过将快速响应的热电伤害感受器与空间分辨的AIE光学层协同集成,系统实现了精确、实时的伤害感受感知与原位热损伤可视化。接触几何的直接光学映射有效解耦了电压信号中的面积诱导伪影,即使在复杂接触条件下也能实现97%的高温度识别准确率。这种稳健性在-10°C至60°C的宽热窗口内得以保持,具有双向敏感性和快速信号恢复能力(<30秒)。经机器人反射弧验证,该平台展示了类似人类的“感知-行动-可视化”能力,确保了对有害刺激的即时自我保护。该工作为构建智能人工感受器界面建立了稳健且可扩展的范式,在提升下一代软体机器人和人机系统的安全性、环境感知能力和自适应性能方面具有重要潜力。