会后空翻、会跳舞的
才艺机器人
频频在各大场合亮相
而可适配繁杂居家场景
自主打理家务、自主学习成长的
家用机器人
始终是AI行业攻坚难题
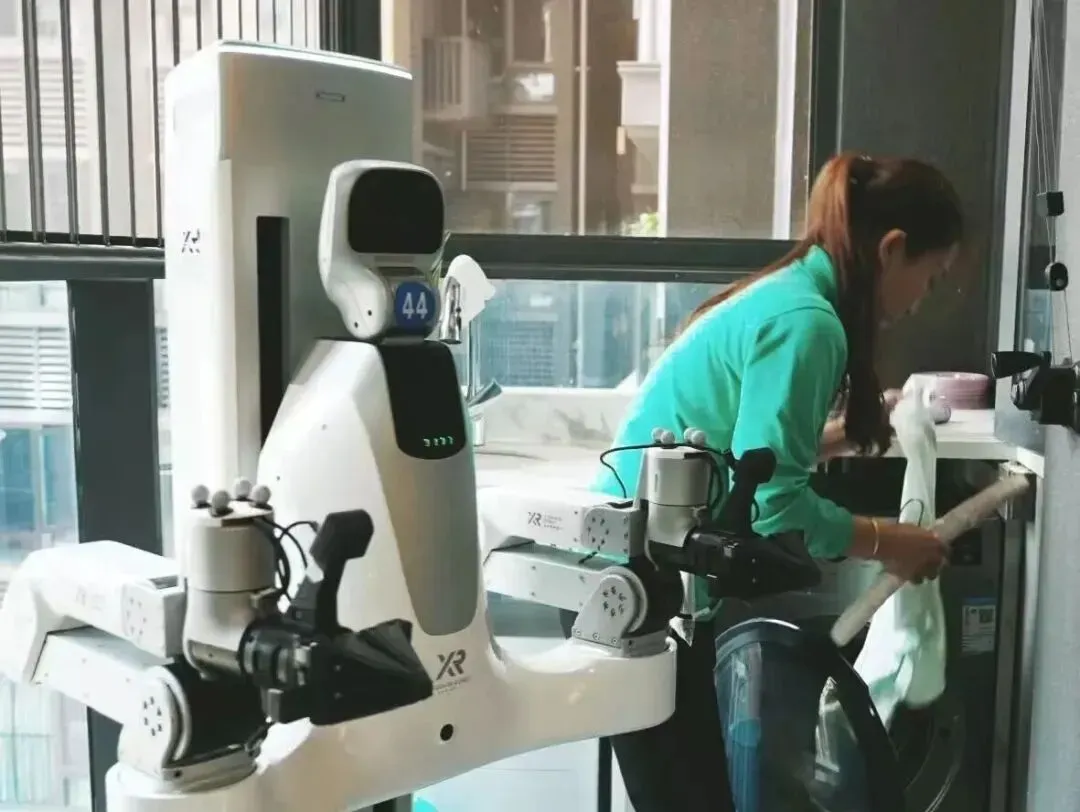
▲点击阅读《上线即约满!国内首个家用保洁机器人上岗,市民:蹲点抢》
从炫技到实用,从实验室到客厅
机器人这条路,到底有多远?
深圳南山企业自变量机器人
给出重磅答案
💥💥💥
全球首个世界统一模型架构(WUM)
具身智能大模型WALL-B正式发布
新一代机器人
即将走进真实家庭
搭载WALL-B的新一代机器人
将批量走进家庭场景
开启机器人服务家庭生活的成长之旅
▲点击阅读《人形机器人进家庭,可能比你想象的更快》
“早上七点,闹钟响了,你走到客厅,拖鞋不知去哪儿,碗没洗、书包扔地上、猫打翻了水……目前全球没有一台机器人,能在无遥控下独立完成这些整理。”发布会上,自变量机器人公司创始人兼CEO王潜用这段日常场景,直击行业痛点。他直言:“机器人硬件已经到位,但大脑没跟上。家庭是随机、碎片、永远在变的考场,是这个时代最难的技术问题之一。”
▲点击阅读《深圳机器人何以惊艳海外》
此前,自变量已推出VLA架构的WALL-A,并实现机器人家庭规模化落地。但联合创始人CTO王昊表示,传统VLA是视觉、语言、动作“拼接”,数据传输损耗大,只会模仿、不懂物理规律。WALL-B不是迭代,而是底层重构:采用WUM统一架构,把多模态、物理预测、动作决策融为一体,彻底消除模块壁垒。
WALL-B模型凭什么敢说
真正“适应生活”?
三大核心突破
给出了它的答案
能同步感知、实时响应。WALL-B从训练第一天起,即对视觉、听觉、语言、触觉、动作等多模态数据进行同步标注与联合训练,实现“多模态进、多模态出”。
WALL-B 能够感知并预测重力、惯性、摩擦力、速度等基本物理规律。在从未见过的场景中——例如一个盘子一半悬空在桌沿外,模型可以推断出盘子可能会掉落摔碎,从而采取预防动作。
目前主流机器人在任务失败后通常直接停止,返回错误信息,无法从失败中学习。WALL-B 的行为模式则完全不同:它在失败后会调整策略再次尝试,如果成功,则将这次成功的经验直接更新到模型参数中,像人学用筷子一样越用越聪明。
在数据上,团队放弃了
实验室的“糖水数据”
而是深入数百个真实家庭
采集“牛奶数据”
让模型真正适应生活
机器人进入家庭的同时
隐私问题也不容回避
王潜对此给出了
自变量团队明确的解决方案
视觉脱敏——机器人在设备端对原始图像进行实时打码处理,原始图像不离开设备,机器人看到的已经是去除个人特征的场景数据。
透明授权——用户主动按下同意键后方可开机,不存在“默认同意”,用户不同意则不开机。
用途限定——绝不共享第三方,机器人只认一个主人,发现可疑指令立即锁定。
“承诺是便宜的,用户信任才是最贵的。”王潜表示。
在商业化落地方面,自变量的时间表也已经明确:35天后,新一代搭载WALL-B,并根据家居环境进行硬件升级的新一代机器人将入驻首批用户的家庭。王潜指出,首批入户机器人仍处于“实习生”阶段,会犯错但24小时在岗,每天都在变聪明。
目前
官方已开启首批家庭用户招募
用户可通过官方渠道
提交申请
WALL-B完整技术细节
将于4月27日在首届
广东省人工智能应用对接大会
全面亮相
从VLA到WUM,从“命令型执行”到“原生多模态思考”,从实验室的完美环境,到千家万户的随机日常,这一步,南山走在了全世界前面。
当机器人不再只会预设动作,而是能弯腰捡起你散落的拖鞋,能在你忙碌时默默收拾好一地狼藉时,我们才真正触摸到了具身智能的温度。让我们共同见证,从南山出发的这场“家庭革命”!
这样的“实习生”管家
你愿意给它一个试用机会吗?留言区说说:你最希望机器人
帮你搞定哪件家务?










 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
