一、摘要
要让机械手实现类人的灵巧操作,需电子皮肤无缝融合多功能感知、决策与交互控制能力,但现有灵巧手电子皮肤存在感知模态单一、制造工艺复杂导致的规模化制备难题。本研究通过界面压缩辅助同轴印刷技术,制备出摩擦电电子皮肤(TE-Skin),实现了超薄传感阵列的规模化制造,可贴合集成于机械手的指尖、手掌和手背全区域。该电子皮肤可同时实现触觉压力成像、动态轨迹识别、材料判别、安全用户认证及手势控制,结合深度学习算法解析复杂摩擦电信号后,材料识别与用户识别的准确率均超 95%。这项工作融合了规模化制造与多功能感知特性,为下一代机器人操作及自然的人机交互提供了多功能平台。
二、研究背景
仿人灵巧机械手的研发是机器人领域的核心方向,其在环境探测、工具操作、精细任务执行中发挥关键作用,广泛应用于外科手术、非结构化空间探索、工业生产及家政服务等领域。人类通过动态调整手掌和手指姿态完成物体抓取,同时依靠皮肤触觉感知机械刺激、提取丰富传感信息,而灵巧机械手也需要人工电子皮肤复刻此类感知与操作能力,以实现与复杂环境的灵敏、自适应交互。
柔性、均一的电子皮肤成为电子系统与机器人本体间的理想交互界面,能提升灵巧机械手的操作精度与适应性,满足工业和民用精细操作需求。功能材料与微纳制造技术的发展,推动了压电、压阻、电容、光学、应变、磁学、摩擦电等多种传感模态的触觉传感器研发,但现有灵巧机械手电子皮肤仍难以媲美人类皮肤的多功能性与性能。
人类手部的机械感受器可感知物体尺寸、形状、纹理和材料属性,而现有研究多仅聚焦于指尖的材料识别、力感知等单一功能,忽略了手掌和手背的传感价值。同时,传感器阵列的规模化与空间分辨率存在瓶颈,高密度、大规模柔性传感网络是手内物体操作和精细触觉辨别的关键,但现有制备方法多依赖繁琐的溶液法工艺、昂贵的材料与设备,缺乏低成本、高通量、规模化的制造手段,难以制备出适用于灵巧手的超薄、高密度、可拉伸传感系统。此外,多数电子皮肤仅聚焦信号采集,而关节驱动闭环控制的有效信号输入对机器人自主操作同样重要,现有技术尚未充分满足灵巧手关节运动的控制需求,亟需开发高效、低成本、规模化的灵巧手机器人交互界面。
三、研究内容
本研究研发出可拉伸摩擦电电子皮肤(TE-Skin),作为灵巧机械手的多功能人机传感界面,其由嵌入摩擦电聚合物薄膜的两层超薄可拉伸正交电极构成,可无缝贴合于机械手指尖、手掌和手背。该电子皮肤通过低成本、简易的界面压缩辅助同轴印刷技术(ICCP)直接印刷制备,解决了制造复杂度与规模化的核心问题。其中,手掌集成的电子皮肤可实现压力成像与单点、多点动态触摸轨迹的稳定识别;指尖模块结合深度学习信号处理,通过摩擦电传感实现精准材料识别;手背的电子皮肤可完成安全的用户认证,并实现关节运动的直观控制,构建起人机双向通信通道;多区域集成的电子皮肤能让灵巧手依托丰富的触觉反馈,安全、自适应地完成高难度抓取任务。
四、结果讨论
(一)灵巧手用 TE-Skin 的设计理念
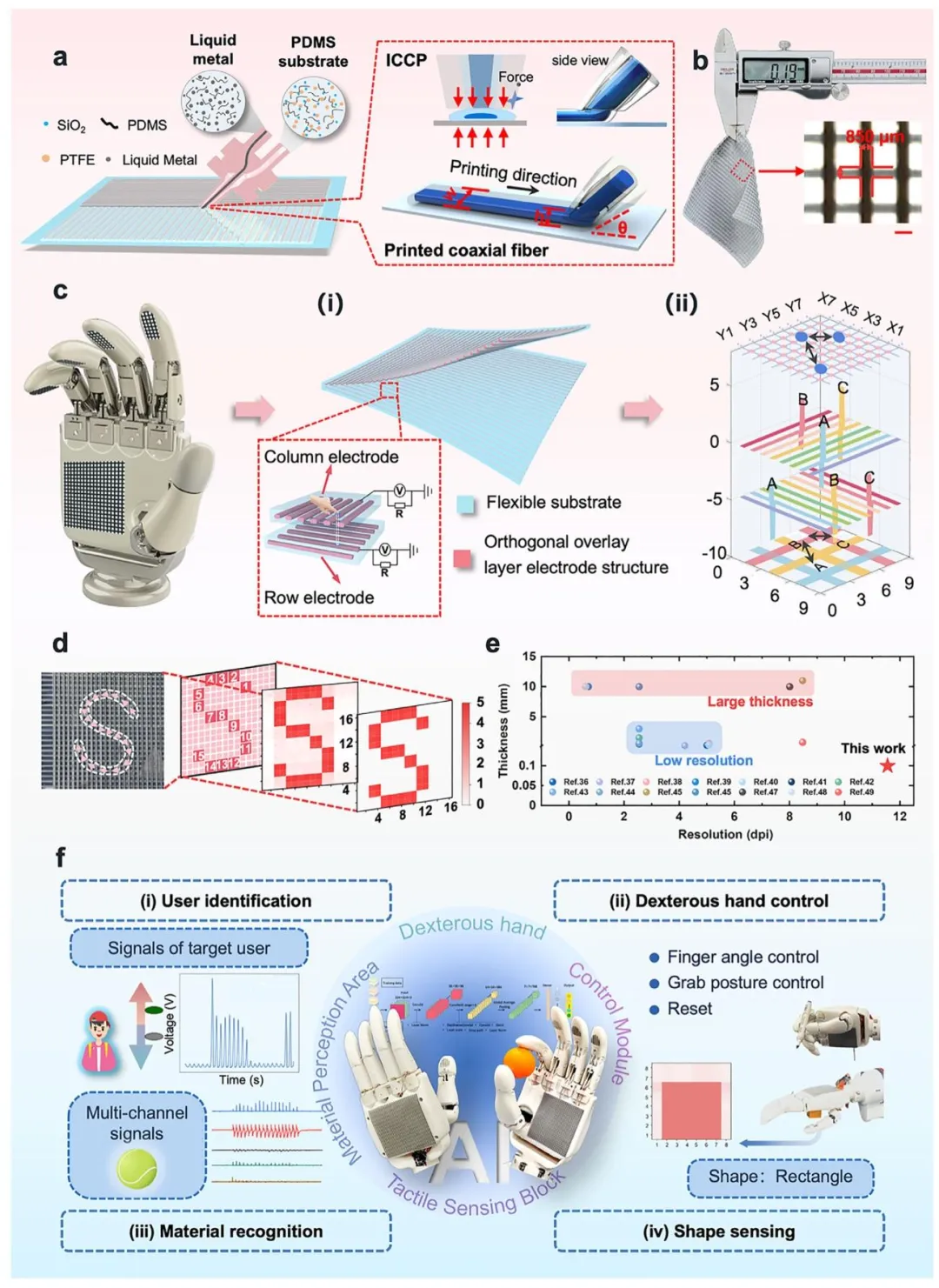
研发界面压缩辅助同轴印刷技术制备超薄、可拉伸 TE-Skin,通过设置远小于喷嘴半径的喷嘴 - 基底间距施加界面压力,将挤出纤维压平为超薄带状结构,制备出总厚度 190 μm 的双层 TE-Skin。该电子皮肤因油墨优异的粘弹性,可紧密贴合各类基底,将其部署于机械手手掌、指尖和手背可实现全方位触觉感知。
TE-Skin 的正交电极交叉处为传感单元,通过摩擦起电与静电感应耦合产生输出电压,可实现多点触摸传感与实时压力分布成像,经阈值设定和滤波抑制串扰后,能精准重构触摸轨迹。与现有电子皮肤相比,该全印刷 TE-Skin 兼具更优的分辨率与超薄双层结构,结合人工智能可实现四大核心功能:用户识别、机械手关节控制、材料识别、物体形状感知。
(二)TE-Skin 的设计、制备与表征
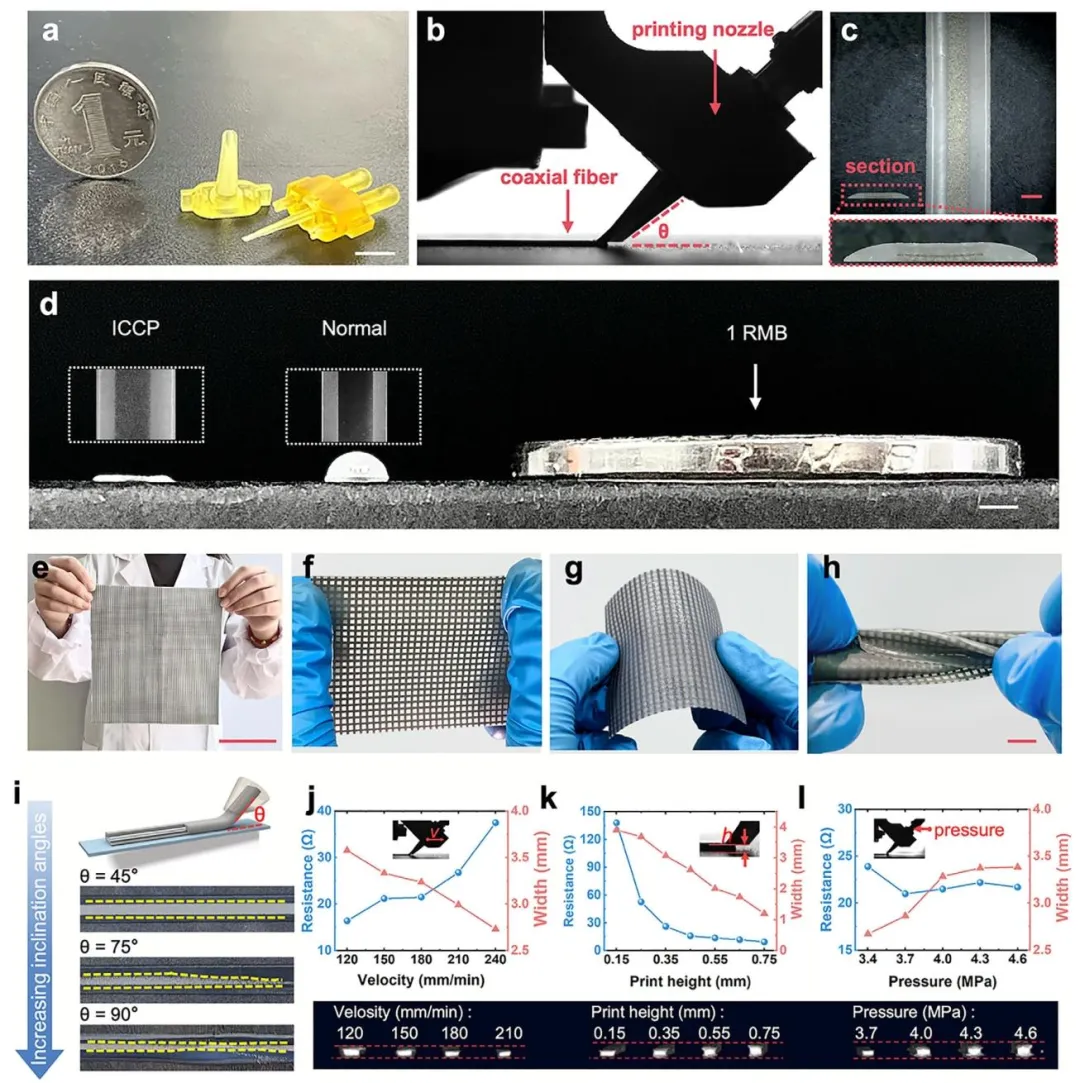
定制带倾斜微平面的同轴打印头,通过高速摄影观测到 ICCP 技术实现了粘弹性油墨的挤出、沉积与界面压缩的一体化过程,印刷的同轴传感纤维壳层宽度约 2.2 mm,内部导电迹线小于 0.8 mm,具有清晰的核 - 壳分层结构。ICCP 技术使纤维厚度仅 0.3 mm,可实现 220 mm×220 mm 的规模化制备,且 TE-Skin 在拉伸、弯曲、扭转等机械变形下仍保持结构完整。
打印头倾角 45° 时纤维轮廓最清晰,通过划针施压可激活纤维核心形成导电通路。印刷速度提升会使纤维电阻升高、宽度减小;喷嘴 - 基底间距增大,纤维电阻与宽度均降低;挤出压力增大则纤维宽度增加、电阻降低。即使纤维中部受损,仍能保持导电性能。
(三)TE-Skin 的工作原理与电学性能
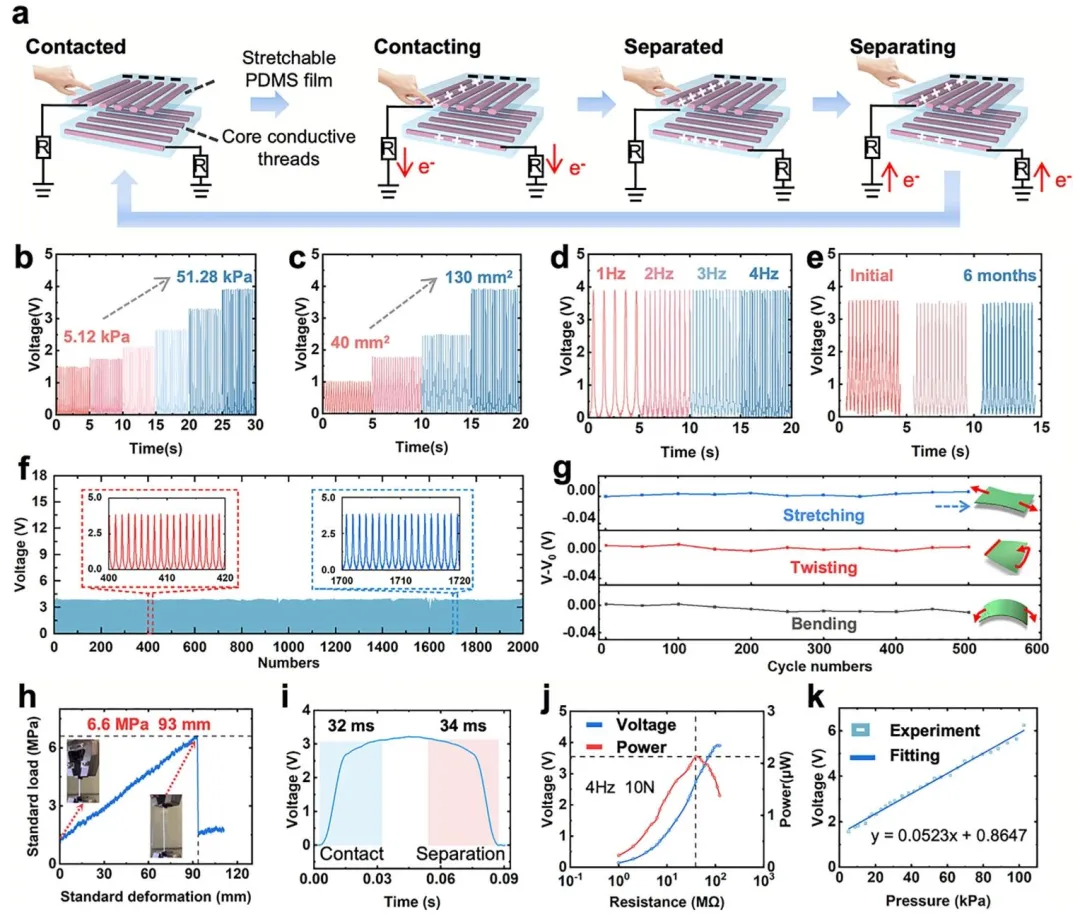
TE-Skin 的同轴传感纤维采用单电极摩擦电模式,硅外层与皮肤接触分离时产生电荷,外力释放与接触过程形成周期性交变电信号,实现动态力感知。其输出电压随施加压力、接触面积增大而升高,在 1~4Hz 频率范围内输出电压稳定,经 6 个月长期测试、2000 次接触 - 分离循环及 600 次拉伸 / 弯曲 / 扭转循环后,性能无明显衰减,75% 应变下仍保持导电。
单根同轴纤维的极限拉伸应力达 6.6 MPa,响应时间 0.032 s、恢复时间 0.034 s,峰值瞬时功率 2.0 μW,0~100 kPa 压力范围内呈线性响应,灵敏度约 4.4 mV/kPa,传感器阵列串扰低。在 22.5~59.2℃、46%~83% RH 环境下,输出性能基本稳定,仅湿度变化会导致信号轻微衰减。
(四)TE-Skin 在灵巧手中的应用
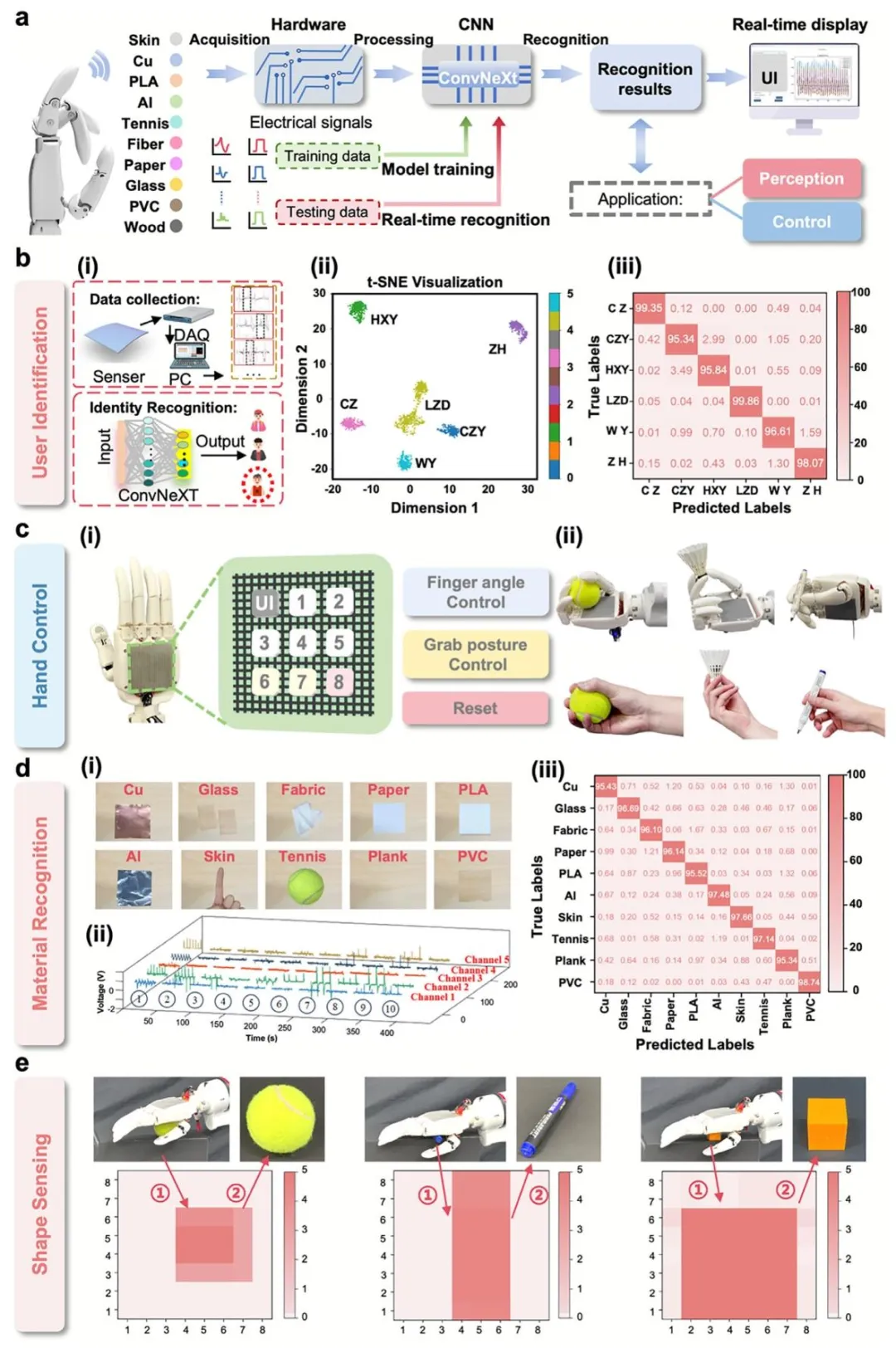
将 TE-Skin 集成于灵巧手全区域,结合 ConvNeXt 神经网络构建起信号采集 - 智能处理 - 结果实时显示的感知系统。手背的 TE-Skin 作为控制板,通过提取手指按压的频率、力度、时长等特征,结合深度学习实现用户识别,准确率超 95%,并将按压信号转化为机械手运动触发信号,九分区控制板可实现手指角度、抓取姿态的精准调控,使机械手成功抓取网球、羽毛球、钢笔等日常物体。
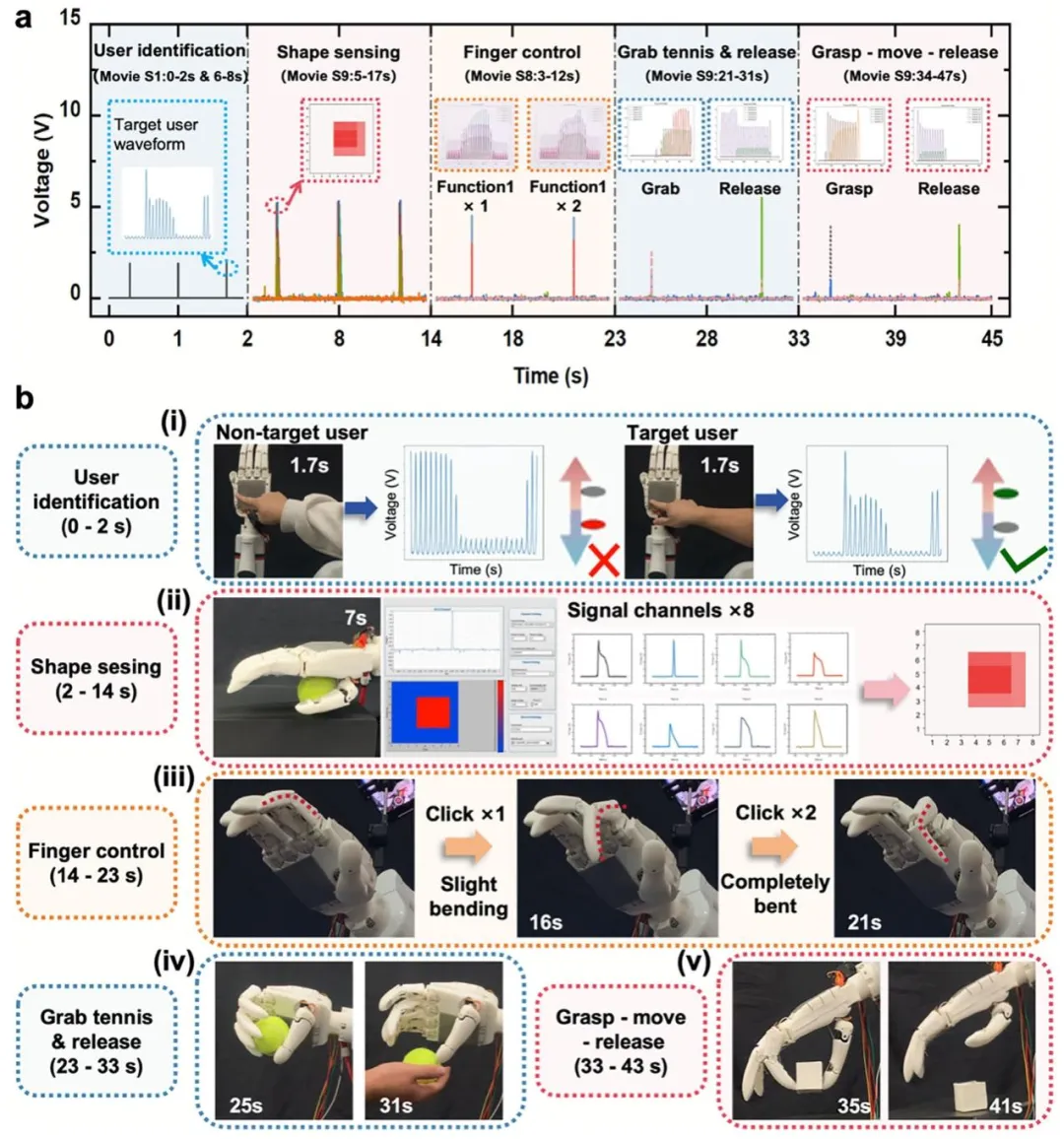
指尖的 TE-Skin 可采集不同材料的特征摩擦电信号,对 10 种不同材料 / 结构的物体识别准确率超 95%;手掌的 TE-Skin 可通过多通道电信号生成触觉成像图,精准识别网球、钢笔、方形模具等不同形状、材料的物体。TE-Skin 可实现全流程的人机交互操作:0~2 s 完成用户识别,2~14 s 实现物体形状感知,14~23 s 调控手指弯曲角度,后续可完成网球的五指抓取释放、纸箱的两指夹持搬运,充分验证了其多功能应用价值。
(五)整体讨论
电子皮肤是灵巧机械手触觉感知的核心,但现有技术难以兼顾机械鲁棒性、规模化与多功能性。本研究的全印刷可拉伸 TE-Skin 通过 ICCP 技术制备,超薄、规模化的特性使其可贴合于机械手全区域,实现了手掌压力成像、指尖材料识别、手背用户认证与运动控制的一体化功能,为下一代人机交互界面提供了新范式。未来研究将聚焦提升 TE-Skin 的实际场景适应性,优化信号处理能力以降低串扰,开发更精细的后处理算法,同时改进 ICCP 制备参数、设计印刷头、优化材料与路径规划方法。
五、总体结论
本研究开发的全印刷可拉伸摩擦电电子皮肤,通过界面压缩辅助同轴印刷技术实现了规模化制备,其总厚度仅 190 μm,可规模化制备至 200×200 mm²,兼具优异的机械鲁棒性,在反复拉伸、弯曲、扭转下仍保持高响应性、稳定性与可重复性。该电子皮肤可贴合集成于灵巧手的指尖、手掌、手背,实现触觉压力成像、动态轨迹识别、材料判别、用户认证、机械手控制等多功能感知与交互。结合人工智能算法后,材料与用户识别准确率均超 95%,能让灵巧手依托丰富的触觉反馈完成精准、安全的物体抓取与操作。这项技术为灵巧手先进多功能传感系统的研发提供了规模化策略,有望提升下一代机器人的感知与控制能力,为机器人领域电子皮肤的设计提供了可行框架,尤其适用于需要精细操作与无缝人机交互的场景。
六、图文概览
图 1、灵巧手用摩擦电电子皮肤(TE-Skin)的系统设计理念。a. 用于传感纤维的界面压缩辅助同轴印刷技术概念及 TE-Skin 的制造工艺示意图;b. 厚度为 190μm 的 TE-Skin 结构(比例尺:1mm);c. TE-Skin 与灵巧手的集成:(i) TE-Skin 示意图,插图为上下传感层结构设计的局部放大图及摩擦电传感器的等效电路;(ii) TE-Skin 实时触觉成像的电压信号测试及数据示意图;d. TE-Skin 在 16×16 通道上的多点触摸识别,从左至右依次为 TE-Skin 上的实际物理轨迹、轨迹覆盖的传感单元分布、原始采集信号重构的轨迹、信号处理后的轨迹;e. 本研究 TE-Skin 与现有报道电子皮肤在分辨率和厚度方面的对比;f. 灵巧手(手掌、指尖、手背)上 TE-Skin 用于人机交互的整体布局及多功能展示:(i) 用户识别;(ii) 灵巧手控制;(iii) 材料识别;(iv) 形状感知。
图 2、基于界面压缩辅助同轴印刷技术的 TE-Skin 制备策略与表征。a. 带倾斜平面的同轴打印头光学图像(比例尺:1 cm);b. 同轴传感纤维的超分辨显微图像,插图为同轴传感纤维的横截面图;c. 高速相机下的同轴传感纤维印刷过程(比例尺:1 mm);d. 界面压缩辅助同轴印刷(ICCP)与常规印刷制备的同轴传感器纤维横截面对比,及与一元硬币的厚度对比,插图为对应俯视图(比例尺:1 mm);e. 200×200 mm² 的规模化 TE-Skin(比例尺:10 cm);f. 拉伸状态下的 TE-Skin;g. 弯曲状态下的 TE-Skin;h. 扭转状态下的 TE-Skin(比例尺:1 cm);i. 打印头倾角对同轴纤维质量影响的示意图与实物图;j. 印刷速度对传感纤维电阻、宽度的影响及显微 CT 表征;k. 印刷高度对传感纤维电阻、宽度的影响及显微 CT 表征;l. 挤出压力对传感纤维电阻、宽度的影响及显微 CT 表征。
图 3、TE-Skin 的工作原理与电学性能。a. TE-Skin 的工作原理;b. 4 Hz 频率下,同轴传感纤维在不同压力下的输出电压;c. 4 Hz 频率下,同轴传感纤维在不同接触面积下的输出电压;d. 51.28 kPa 压力下,同轴传感纤维在不同频率下的输出电压;e. 同轴传感纤维的长期稳定性;f. 4 Hz、51.28 kPa 压力下,同轴传感纤维的压力稳定性测试;g. TE-Skin 在不同循环次数下的输出性能:(i) 拉伸 - 恢复状态;(ii) 扭转 - 恢复状态;(iii) 弯曲 - 恢复状态;h. 同轴传感纤维的拉伸强度,插图为测试过程;i. TE-Skin 的响应时间与恢复时间;j. TE-Skin 的功率密度;k. TE-Skin 的压力灵敏度。
图 4、TE-Skin 在灵巧手中的应用。a. 实时材料传感系统的结构,包括信号采集、智能数据处理、识别结果实时显示;b. 灵巧手用于用户识别的 TE-Skin:(i) TE-Skin 实现用户识别的工作流程图;(ii) 各用户特征分类的 t-SNE 散点图;(iii) 用户认证的混淆矩阵;c. 人机交互界面的功能定义:(i) TE-Skin 分为九个区域,可用于控制灵巧手的运动;(ii) 灵巧手与人类手对不同抓取物体的静态姿态对比;d. 用于材料识别的 TE-Skin:(i) 10 种不同物体的数码照片(比例尺:2 cm);(ii) 指尖 TE-Skin 感知 10 种物体的时域信号;(iii) 灵巧手识别 10 种不同物体的混淆矩阵;e. 用于形状识别的 TE-Skin,灵巧手按压过程中的典型实物图、视觉图像及对应的触觉成像图:(i) 网球(比例尺:2 cm);(ii) 钢笔(比例尺:1 cm);(iii) 方形模具(比例尺:2 cm)。
图 5、TE-Skin 在灵巧手连续用户识别、形状感知、手指控制及物体抓取中的性能演示。a. 灵巧手完成抓取任务的全过程;b. TE-Skin 在灵巧手中的应用流程:(i) 通过输出信号差异区分目标用户(绿灯)与非目标用户(红灯);(ii) TE-Skin 实时触觉成像的电压信号测试及数据示意图;(iii) 灵巧手食指弯曲角度的控制;(iv) 灵巧手对网球的抓取与放置动作;(v) 灵巧手对纸箱的抓取与放置动作。
七、作者信息
作者姓名:
Zhaoya Chen, Yuan Jin, Zhanda Li, Bei Wang, Bin Liu, Bin Xu, Feng Gong*, Lelun Jiang*, Hui Li*
Feng Gong*: Guangdong Provincial Key Laboratory of Micro/Nano Optomechatronics Engineering, College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen, China.Lelun Jiang*: School of Biomedical Engineering, Shenzhen Campus of Sun Yat-Sen University, Shenzhen, China.Hui Li*: Guangdong Provincial Key Laboratory of Micro/Nano Optomechatronics Engineering, College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen, China.八、论文链接
https://doi.org/10.1002/adfm.202527673
九、版权声明
本文来源各大出版社论文数据库,版权归文章出版社所有;本文内容采用 AI 辅助整理生成,如有错漏请私信联系;本文仅用于学术分享,转载请注明出处;如需推广本人学术成果和商务合作请私信联系,若有错漏或侵权请私信联系删除或修改!
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
