灵巧机器人手的开发旨在模仿人类在抓取、操作和交互中的精细能力,但现有电子皮肤(E-skin)往往局限于单一感知模态,且制造工艺复杂,导致可扩展性差,无法实现全面集成和多功能感知。本研究通过引入界面压缩辅助同轴印刷(ICCP)技术,开发了一种摩擦电电子皮肤(TE-Skin),解决了制造复杂性和功能单一的难题。该皮肤厚度仅190 µm,可顺应集成于机器人手的指尖、手掌和手背,实现压力映射、轨迹识别、材料区分、用户认证和手势控制。结合深度学习算法,系统在材料和用户识别上准确率超过95%,为机器人操作和人机交互提供了高效平台。相关研究成果于近日发表于Advanced Functional Materials期刊(IF=19.0)。
【文献速览】
机器人学领域长期追求类人灵巧手,以应对医疗手术、工业生产和家政服务等复杂场景。人类手通过机械感受器感知物体形状、纹理和材料,并动态调整姿势实现适应性交互。然而,传统机器人手缺乏类似触觉系统,导致操作精度和安全性不足。近年来,E-skin作为柔性界面快速发展,基于压电、压阻、电容等机制的传感器阵列已实现初步触觉感知。但现有技术多聚焦指尖单一功能,忽略手掌和手背的贡献;同时,制造依赖劳动密集型工艺和高成本设备,难以实现高密度、大规模生产。此外,信号采集与闭环控制的脱节限制了自主操作。面对这些挑战,研究亟需一种低成本、可扩展的多功能E-skin,以桥接感知与交互,提升机器人手的整体性能。本研究的核心创新是ICCP印刷方法,该技术通过压缩喷嘴与基底距离,将传统圆形纤维压扁成超薄带状,实现厚度仅0.3 mm的同轴感测纤维。TE-Skin由嵌入摩擦电聚合物膜的两层正交电极组成,利用摩擦起电和静电感应产生电压信号,支持自供电感知。制造过程包括定制墨水挤出、90°旋转沉积和刻划激活,确保结构完整性和附着力。参数优化显示,打印速度、高度和压力影响纤维电阻和宽度,Micro-CT成像验证了芯-壳结构的均匀性。性能测试表明,TE-Skin在压力(0-100 kPa)下灵敏度达4.4 mV/kPa,响应/恢复时间仅0.032/0.034 s,功率密度2.0 µW。长期稳定性强,经2000周期和6个月测试无衰减;机械鲁棒性优秀,可承受75%拉伸和反复弯曲/扭曲。集成于灵巧手后,手掌TE-Skin实现16×16通道的多点轨迹重建(如“S”形路径)和形状感知(网球、笔等物体);指尖模块结合ConvNeXt算法,对10种材料(如玻璃、塑料)识别准确率超95%;手背作为控制板,支持用户认证(t-SNE特征分类,准确率>95%)和关节控制(如手指弯曲45°/90°)。实际演示中,系统完成连续任务:用户验证、形状映射、抓取网球/纸箱,证明了安全适应性。【数据速览】
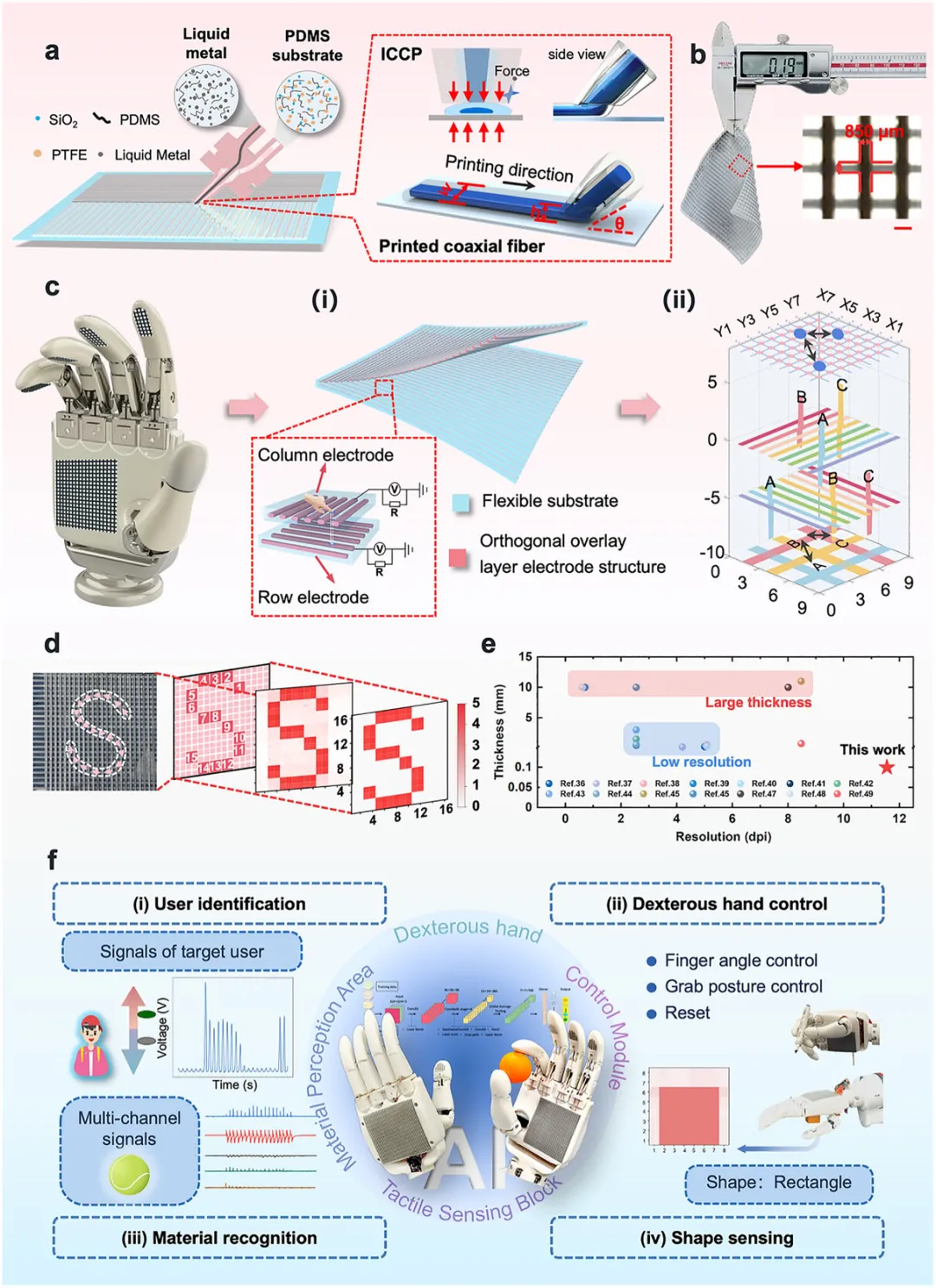
图1. 用于灵巧手的摩擦电电子皮肤(TE-skin)的系统设计概念。a. 界面压缩辅助同轴印刷用于感测纤维的概念以及TE-skin制造过程的示意图。b. 厚度为190 µm的TE-skin配置(比例尺:1 mm)。c. TE-skin与灵巧手的集成:(i)TE-skin的插图,插图显示顶层和底层感测层的结构设计局部放大视图,并呈现摩擦电传感器的等效电路;(ii)由TE-skin实时测量的电压信号和触觉映射数据示意图。d. TE-skin在16×16通道上对多点触摸的识别。从左到右,表示TE-skin上的实际物理轨迹、轨迹覆盖的感测单元分布、从原始采集信号重建的轨迹、信号处理后的轨迹。e. TE-skin与当前报道的电子皮肤在分辨率和厚度方面的比较。f. 灵巧手TE-skin的概述和多功能,用于人机交互(手掌、指尖和手背):(i)用户识别;(ii)灵巧手控制;(iii)材料识别;(iv)形状感测。
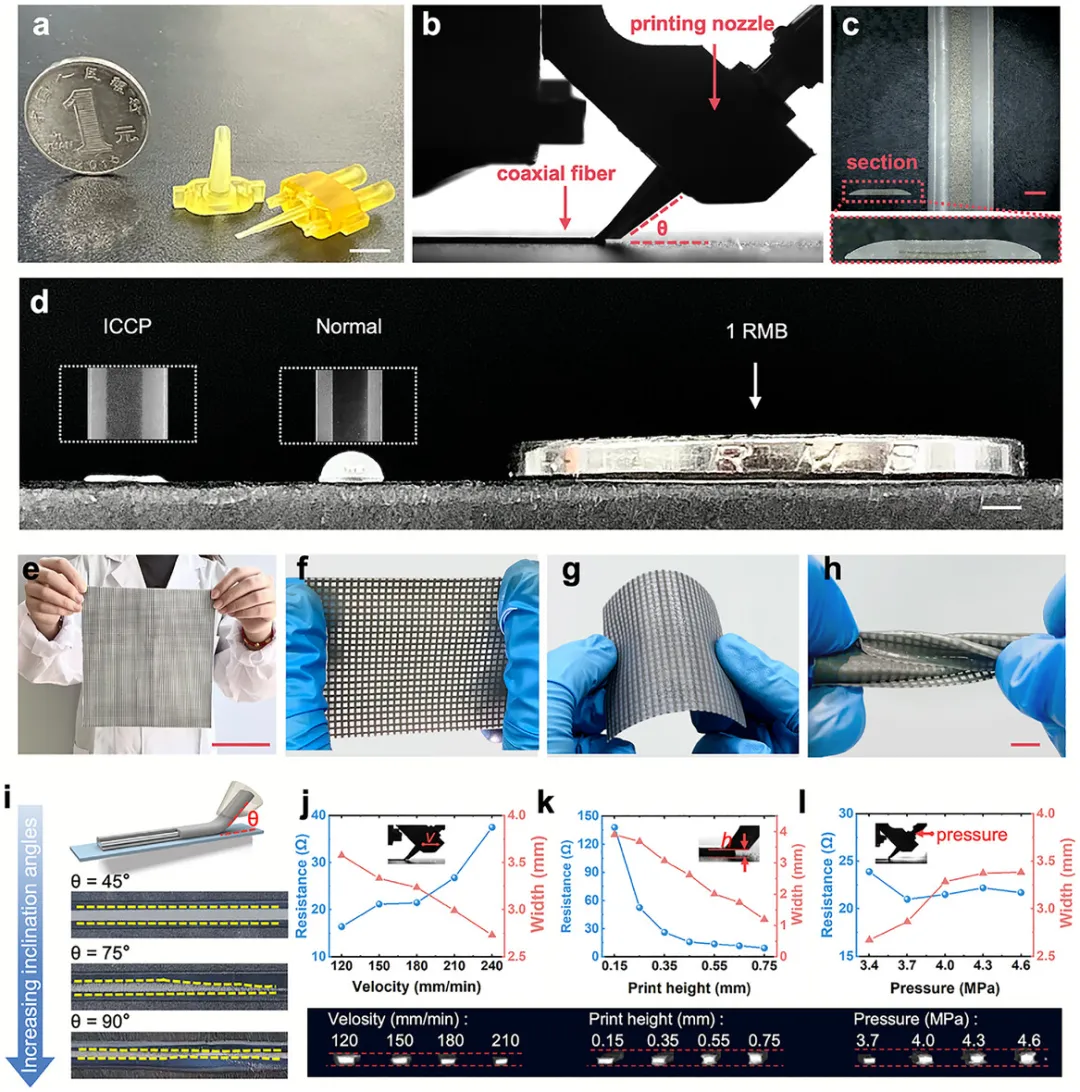
图2. 基于界面压缩辅助同轴印刷的TE-skin制造策略和表征。a. 具有倾斜平面的同轴打印头的光学图像(比例尺:1 cm)。b. 同轴感测纤维的超分辨率显微图像。插图显示同轴感测纤维的横截面视图。c. 高速相机下的同轴感测纤维印刷过程(比例尺:1 mm)。d. ICCP同轴传感纤维和普通印刷纤维的横截面视图,与一元人民币比较,插图对应顶视图(比例尺:1 mm)。e. 尺寸为200 × 200 mm2的可扩展TE-skin(比例尺:10 cm)。f. 拉伸TE-skin。g. 弯曲TE-skin。h. 扭曲TE-skin(比例尺:1 cm)。i. 打印头倾斜角度对同轴纤维质量影响的示意图和物理图。j. 打印速度(v)对感测纤维电阻和宽度的影响以及Micro-CT表征。k. 打印高度(h)对感测纤维电阻和宽度的影响以及Micro-CT表征。l. 挤出压力(p)对感测纤维电阻和宽度的影响以及Micro-CT表征。
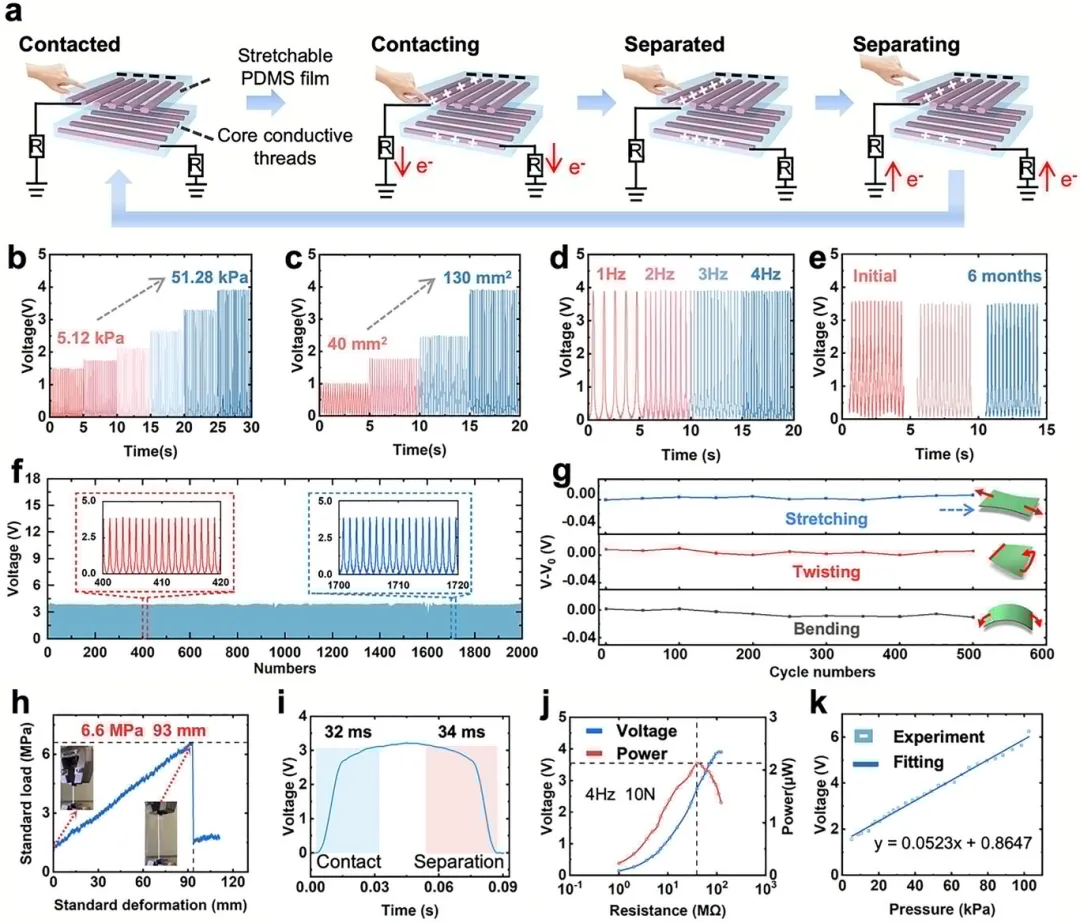
图3. TE-skin的工作原理和电子性能。a. TE-skin的工作原理。b. 在4 Hz频率下,同轴感测纤维在增加压力下的输出电压。c. 在4 Hz频率下,同轴感测纤维在增加接触面积下的输出电压。d. 在51.28 kPa压力下,同轴感测纤维在增加频率下的输出电压。e. 同轴感测纤维的长期稳定性。f. 在4 Hz频率和51.28 kPa压力下压力稳定性测量。g. TE-skin在不同重复下的输出性能:(i)拉伸-恢复条件;(ii)扭曲-恢复条件;(iii)弯曲-恢复条件。h. 同轴感测纤维的拉伸强度,插图显示测试过程。i. TE-skin的响应时间和恢复时间。j. TE-skin的功率密度。k. TE-skin的灵敏度。
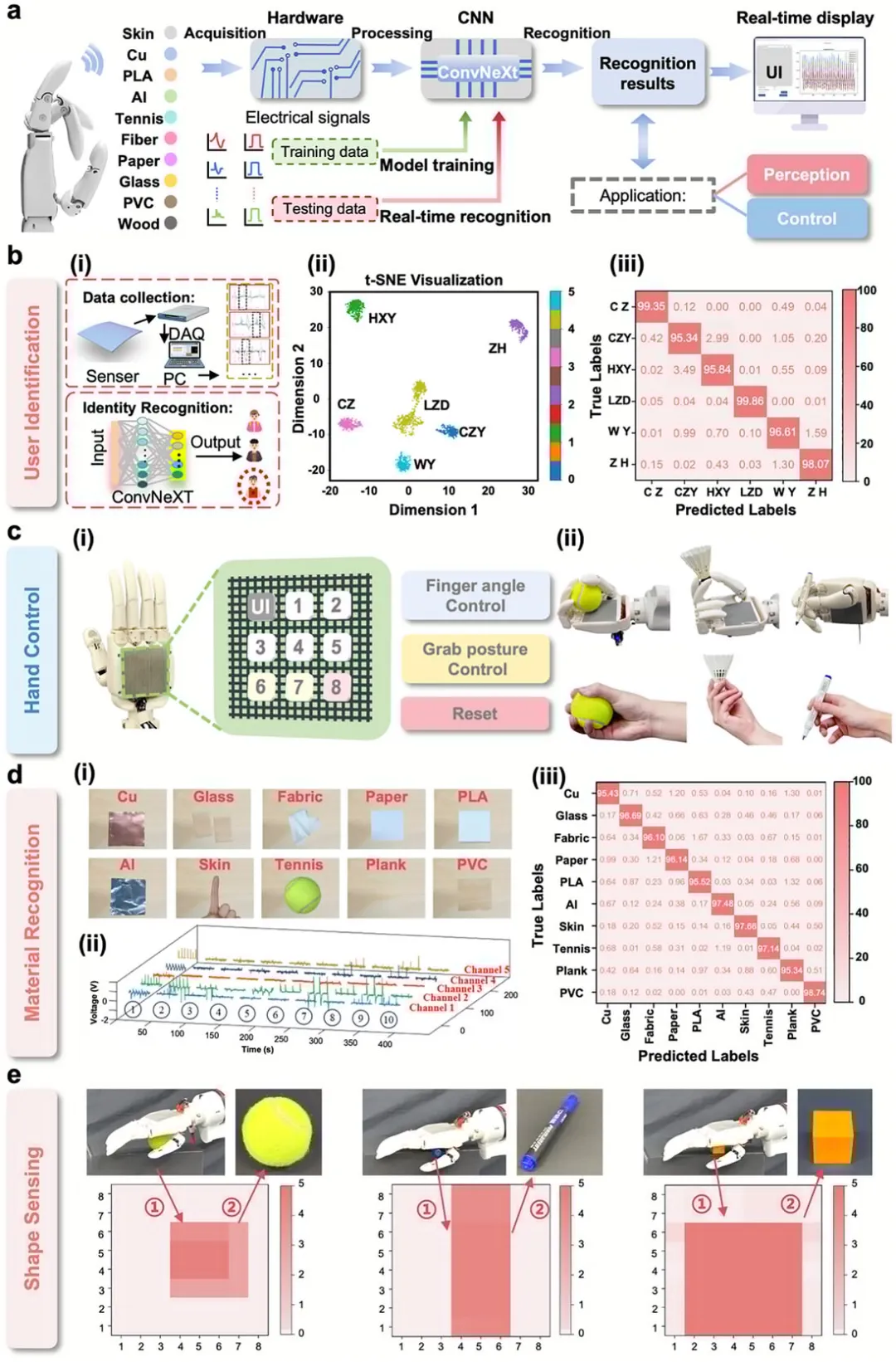
图4. TE-skin在灵巧手中的应用。a. 实时材料感测系统的结构,包括信号采集、智能数据处理和认知结果的实时显示。b. 灵巧手上的TE-skin用于用户识别。(i)TE-skin用于用户识别的工作流程。(ii)每个用户的特征分类t-SNE散点图。(iii)认证混淆矩阵。c. 人机交互界面的功能定义。(i)TE-skin的区域分为九个部分,可用于控制灵巧手运动。(ii)灵巧手和人手对各种抓取物体的静态姿势。d. TE-skin用于材料识别。(i)10种不同物体的数字照片(比例尺:2 cm)。(ii)使用指尖TE-skin感测的10种物体的时域信号。(iii)灵巧手对10种不同物体的识别混淆矩阵。e. TE-skin用于形状识别,一组代表性示例、视觉图像以及灵巧手按压期间的相应触觉图。(i)网球(比例尺:2 cm)。(ii)笔(比例尺:1 cm)。(iii)方形模具(比例尺:2 cm)。
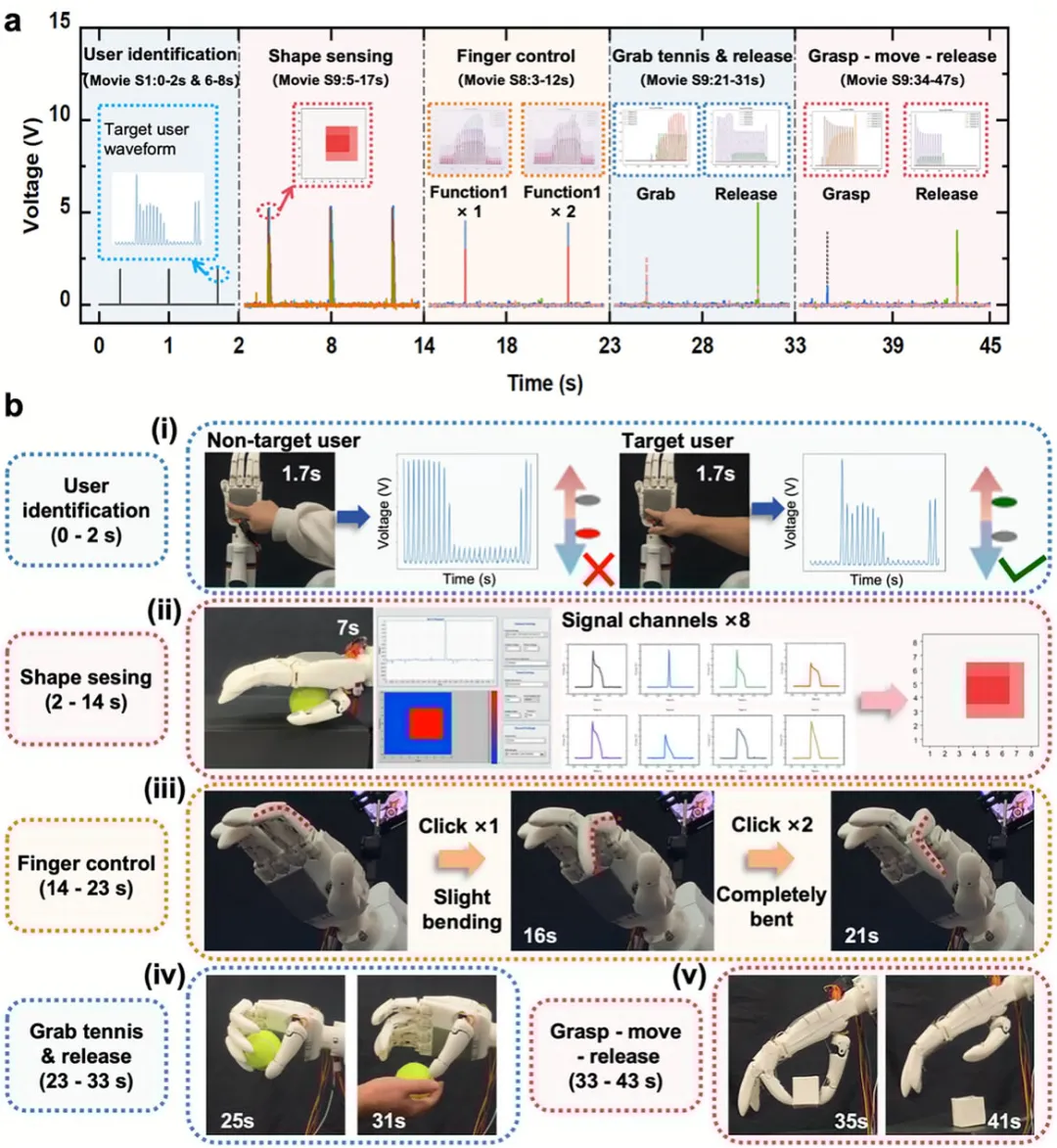
图5. 使用灵巧手演示TE-skin在连续用户识别、形状感测、手指控制和物体抓取中的能力。a. 灵巧手被控制用于抓取任务。b. TE-skin在灵巧手中的应用过程。(i)输出信号的差异可区分目标用户(绿灯)和非目标用户(红灯)。(ii)由TE-skin实时测量的电压信号和触觉映射数据示意图。(iii)灵巧手食指弯曲角度的控制。(iv)灵巧手对网球的抓取和放置运动。(v)灵巧手对纸箱的抓取和放置运动。
【总结与展望】
本研究通过ICCP制造的TE-Skin,实现了全印刷、可拉伸的多功能E-skin,显著提升了灵巧手的感知和交互能力。该技术融合AI解码复杂信号,构建了统一平台,适用于精细操作场景。未来,可优化信号处理以减少串扰,引入绝缘层提升时空映射;进一步探索打印头设计和材料选择,扩展到更多机器人应用。该工作为E-skin提供了新范式,推动人机融合向智能化方向发展。
原文链接:(或点击左下角阅读原文)
Zhaoya Chen, Yuan Jin, Zhanda Li, et al. An AI-Powered, All-Printed, Scalable, Stretchable Triboelectric E-Skin for Multifunctional Perception in Dexterous Hand, Advanced Functional Materials, 2026
IF 19.0SCIEJCR Q1材料科学1区TopEI
https://doi.org/10.1002/adfm.202527673
【声明】
如有表述不准确之处,欢迎留言或私信指正
机器学习相关电子书籍,后台私信【机器学习】
欢迎各位老师、同学们投稿


感谢大家的转发与关注