🐉 龙哥读论文知识星球来了!还在为模型在雨雪天“罢工”而头疼?想系统学习如何让AI“风雨无阻”?星球里不仅有这篇MRGeo的深度拆解,更有海量图像增强、鲁棒性研究、自动驾驶定位等领域的干货论文、代码和趋势分析,帮你快速构建抗干扰模型!👇扫码加入「龙哥读论文」知识星球,前沿干货、实用资源一站式拿捏~

龙哥推荐理由:
这篇论文戳中了一个非常现实且关键的痛点:AI模型在实验室“满分”,一到真实恶劣环境就“挂科”。深圳大学团队没有选择在干净数据上继续“卷”精度,而是直面雨雪雾霾等图像退化问题,提出了首个系统性的跨视角地理定位鲁棒性解决方案MRGeo。其“特征增强+结构约束”的分层防御思想清晰有效,实验充分,代码已开源,对于从事自动驾驶定位、机器人导航、图像增强等领域的研究者和工程师来说,具有很高的参考价值和启发性。👍
原论文信息如下:
论文标题:
MRGeo: Robust Cross-View Geo-Localization of Corrupted Images via Spatial and Channel Feature Enhancement
发表日期:
2026年03月
发表单位:
深圳大学计算机与软件工程学院
原文链接:
https://arxiv.org/pdf/2603.12587v1.pdf
开源代码链接:
https://github.com/WLHASH/MRGeo
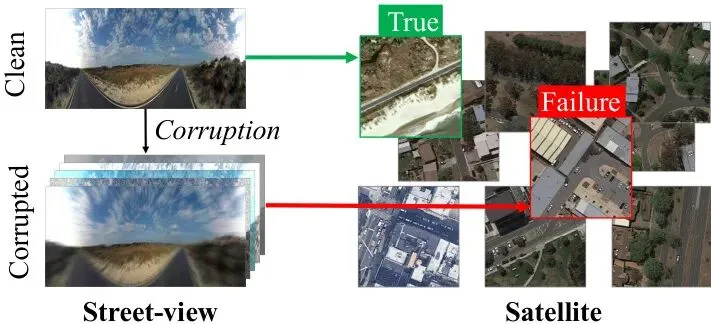 图1:现有CVGL模型在真实世界图像损坏下的脆弱性。模型可以轻松匹配干净的街景图像到其正确的卫星图像(上),但当查询图像受到雨雪或模糊等常见损坏影响时,其性能崩溃,通常导致定位完全失败(下)。
想象一下,你正坐在一辆自动驾驶汽车里,窗外是瓢泼大雨或弥漫的大雾。汽车依赖的视觉定位系统,平时在晴空万里时精准无比,现在却突然“迷路”了——它无法将模糊不清的街景图像与地图数据库中的卫星图像正确匹配。这不是科幻,而是当前许多先进地理定位AI在真实世界中面临的尴尬境地。
实验室里刷榜刷到接近满分,一到现实恶劣环境就“挂科”,这成了许多AI模型的通病。而今天要聊的这篇来自深圳大学的论文《MRGeo》,就是专门给这种“玻璃心”模型穿上“防弹衣”的。它提出了一个系统性的方法,首次瞄准了跨视角地理定位 (Cross-View Geo-Localization, CVGL)任务在图像损坏下的鲁棒性问题。
图1:现有CVGL模型在真实世界图像损坏下的脆弱性。模型可以轻松匹配干净的街景图像到其正确的卫星图像(上),但当查询图像受到雨雪或模糊等常见损坏影响时,其性能崩溃,通常导致定位完全失败(下)。
想象一下,你正坐在一辆自动驾驶汽车里,窗外是瓢泼大雨或弥漫的大雾。汽车依赖的视觉定位系统,平时在晴空万里时精准无比,现在却突然“迷路”了——它无法将模糊不清的街景图像与地图数据库中的卫星图像正确匹配。这不是科幻,而是当前许多先进地理定位AI在真实世界中面临的尴尬境地。
实验室里刷榜刷到接近满分,一到现实恶劣环境就“挂科”,这成了许多AI模型的通病。而今天要聊的这篇来自深圳大学的论文《MRGeo》,就是专门给这种“玻璃心”模型穿上“防弹衣”的。它提出了一个系统性的方法,首次瞄准了跨视角地理定位 (Cross-View Geo-Localization, CVGL)任务在图像损坏下的鲁棒性问题。
当街景“蒙尘”:现有地理定位模型的脆弱性
什么是CVGL?简单说,就是给你一张地面拍摄的街景照片(比如手机拍的),让你从成千上万张覆盖全球的卫星照片里,找到它对应的那一个“天眼视角”。这就像玩一个超难版的“大家来找茬”,只不过两个视图的角度差了90度,景象看起来完全不同。
过去几年,研究者们在这个任务上取得了巨大进展,在一些标准数据集上,模型的准确率已经接近完美。但问题来了:这些数据集里的图片都是干净、理想的。现实呢?现实是摄像头会脏、镜头会模糊、会遇到雨雪雾霾、图像传输会被压缩产生噪点……这些统称为“图像损坏”。
论文一针见血地指出,现有CVGL模型性能暴跌的核心原因在于它们的“偏食”——它们太依赖图像中精细的局部细节(比如墙壁纹理、窗户形状)来做匹配。这些细节在干净图片里是“指纹”一样的存在,但在模糊、雨滴覆盖下,它们最先被抹除,变得不可靠。
在空间层面:冲突在于,损坏(如模糊)主要摧毁细节,而相对鲁棒的全局语义结构(如道路走向、街区布局)却得以保留。但光靠这些全局信息,又难以区分两个看起来布局相似的十字路口。
在通道层面:图像由红、绿、蓝等通道组成。损坏(如对比度变化)直接扰乱了像素值,这种扰动会在神经网络中累积,导致通道层面的信息扭曲和丢失。传统的通道注意力机制对所有位置“一视同仁”的加权方式,难以应对这种复杂、不均匀的失真。
MRGeo的“三重防御”:从特征到结构的鲁棒性构建
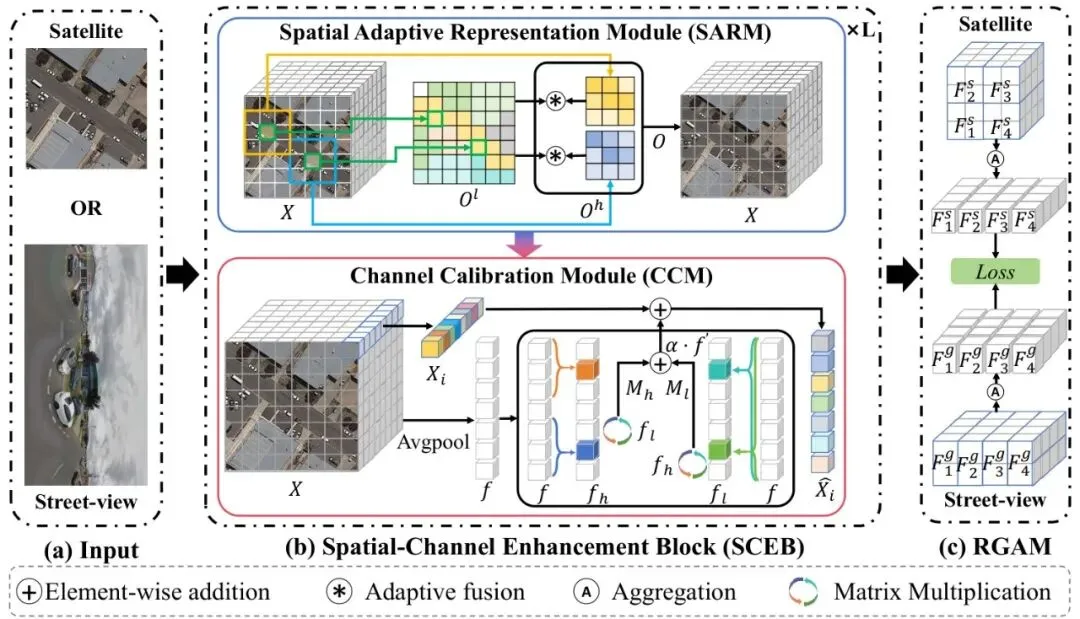
面对多层次的攻击,深圳大学的团队没有选择“头痛医头,脚痛医脚”,而是祭出了一套组合拳,名为MRGeo。其核心思想是:要实现真正的鲁棒性,需要两步走——1. 增强核心特征的内在质量;2. 施加一个强有力的几何结构先验。图2:MRGeo架构总览。框架通过一个包含提出的空间-通道增强块的共享权重骨干网络处理街景和卫星图像。SCEB通过其两个子模块SARM和CCM增强特征质量。最后,区域级几何对齐模块对增强后的特征施加结构约束,以生成用于检索的鲁棒最终描述符。
整个方法像一个精密的“防御工事”,我们逐层来看它的“三重防御”:
第一重防御(特征空间):动态仲裁的“智能开关” - 空间自适应表示模块
这个模块的英文全称是Spatial Adaptive Representation Module (SARM),专门解决空间层面的冲突。它的策略很巧妙:不二选一,而是两条腿走路。
它并行的提取两种特征:全局语义特征(关注整张图的布局,鲁棒但粗糙)和局部细节特征(关注小范围内的纹理,精准但脆弱)。
最关键的一步来了:如何融合?MRGeo没有用固定比例,而是设计了一个动态门控机制。这个门就像一个“智能开关”,它会根据输入特征自动判断局部细节的可靠性。
 融合公式:O = O^l + σ(FC([O^l, O^h])) ⊙ O^h。这里σ是Sigmoid函数,产生一个在0到1之间的门控值。如果图像被严重损坏,局部特征O^h不可靠,门控值就趋近于0,模型主要依赖鲁棒的全局特征O^l。如果图像干净,门控值就变大,让局部特征充分发挥作用,追求更高精度。这就像给模型装了一个能根据“天气”自动调节的雨刷器。
融合公式:O = O^l + σ(FC([O^l, O^h])) ⊙ O^h。这里σ是Sigmoid函数,产生一个在0到1之间的门控值。如果图像被严重损坏,局部特征O^h不可靠,门控值就趋近于0,模型主要依赖鲁棒的全局特征O^l。如果图像干净,门控值就变大,让局部特征充分发挥作用,追求更高精度。这就像给模型装了一个能根据“天气”自动调节的雨刷器。
第二重防御(特征通道):精密校准的“补偿器” - 通道校准模块
解决了空间问题,还有通道问题。论文提出了Channel Calibration Module (CCM)。它不满足于简单地对所有通道进行缩放(重加权),而是进行更精细的补偿性校准。
它的工作流程是:先获取全局的通道特征,然后将这个特征解耦成两部分——一部分代表通道的全局结构模式(用全连接层捕获),另一部分代表相邻通道间的局部依赖关系(用一维卷积捕获)。
然后,让这两部分相互计算关联,得到一个更鲁棒、信息更丰富的通道校正信号。最后,这个信号像一个“校准液”一样,被动态地、可学习强度地注入到特征图的每一个空间位置,去修正因损坏而扭曲的通道信息。
 CCM核心计算:f' = B(f_h · f_l^T) + B(f_l · f_h^T)。这里f_l和f_h是解耦出的两种通道特征,通过矩阵相乘计算它们之间的相互关联,再通过求和函数B转化为一个校正向量f'。
SARM和CCM共同组成了空间-通道增强块 (Spatial-Channel Enhancement Block, SCEB),完成了第一阶段的“特征质量增强”。
CCM核心计算:f' = B(f_h · f_l^T) + B(f_l · f_h^T)。这里f_l和f_h是解耦出的两种通道特征,通过矩阵相乘计算它们之间的相互关联,再通过求和函数B转化为一个校正向量f'。
SARM和CCM共同组成了空间-通道增强块 (Spatial-Channel Enhancement Block, SCEB),完成了第一阶段的“特征质量增强”。
第三重防御(匹配结构):强制对齐的“硬规则” - 区域级几何对齐模块
即使特征增强了,在严重损坏下,特征仍可能变得模糊,导致模型把语义相似但地理位置不同的区域匹配在一起。为此,论文引入了Region-level Geometric Alignment Module (RGAM)。
这个模块的做法简单粗暴但有效:它根据两种视图(街景和卫星)固有的空间对应关系,将特征图强行划分成网格。比如,将街景特征图平均切成4个长条(1x4),将卫星特征图切成2x2的四个方块。
 RGAM构建描述符:f^i = [A(F_1^i), A(F_2^i), A(F_3^i), A(F_4^i)]。即,对每个视图i(街景g或卫星s),将其特征图划分的四个区域F_1到F_4分别进行池化A(·),然后按固定顺序拼接成最终描述符。
然后,按照固定的空间顺序(比如从左到右,从上到下)把这些区域的特征向量拼接起来。这样做,相当于给模型加了一条“硬规则”:匹配必须在对应的地理区域内进行。即使细节全丢了,这个粗粒度的几何结构先验也能在很大程度上防止匹配“跑偏”。
RGAM构建描述符:f^i = [A(F_1^i), A(F_2^i), A(F_3^i), A(F_4^i)]。即,对每个视图i(街景g或卫星s),将其特征图划分的四个区域F_1到F_4分别进行池化A(·),然后按固定顺序拼接成最终描述符。
然后,按照固定的空间顺序(比如从左到右,从上到下)把这些区域的特征向量拼接起来。这样做,相当于给模型加了一条“硬规则”:匹配必须在对应的地理区域内进行。即使细节全丢了,这个粗粒度的几何结构先验也能在很大程度上防止匹配“跑偏”。
实验验证:全面领先的鲁棒性与泛化能力
理论设计得再好,还得看实战效果。论文在专门为CVGL设计的鲁棒性基准测试集上,将MRGeo与6个最新的先进方法进行了全面对比。
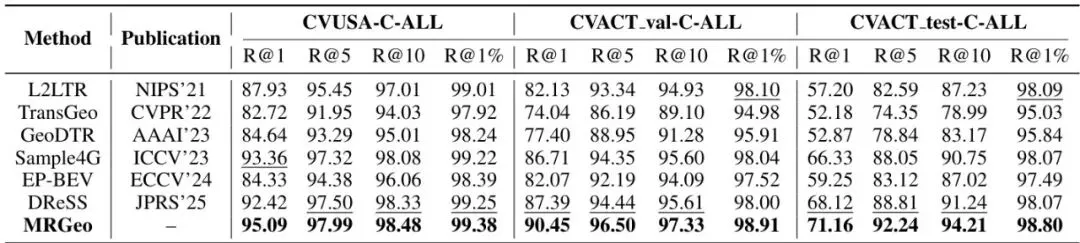
首先看综合性能。表1展示了在所有16种损坏类型混合的大杂烩测试集上的结果,评价指标是R@1(排名第一的正确率)。MRGeo在三个不同的综合测试集上均取得了全面领先,尤其是在最具挑战性的CVACT test-C-ALL上,以71.16%的R@1超越了之前最好的方法DReSS(68.12%)超过3个百分点,提升显著。表1:跨视角地理定位方法在综合损坏鲁棒性基准测试上的实验结果。
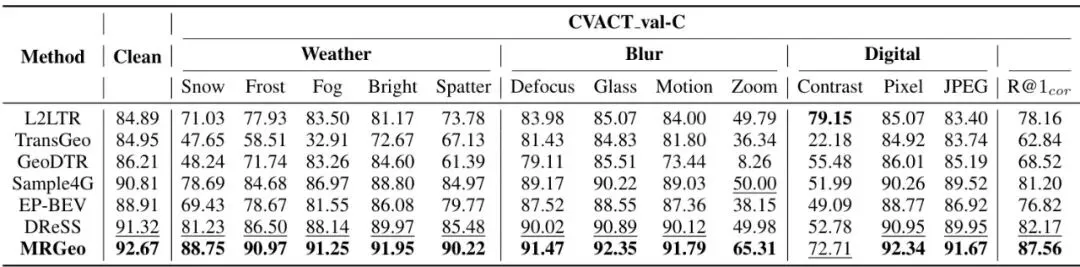
接着看细分性能。表2详细展示了在不同类型的损坏(天气、模糊、数字干扰)下的表现。结果非常有意思:“雪”、“缩放模糊”、“对比度”是对模型伤害最大的三种损坏。然而,即使在这些最棘手的情况下,MRGeo依然表现出了惊人的韧性。
在“雪”的干扰下,MRGeo比第二名高出7.52%;在“缩放模糊”下,更是高出惊人的15.33%!论文也诚实地指出了在“对比度”极度降低(严重度等级5)时的不足,此时图像信息高度同质化,SARM和CCM的调节机制可能失效。但即便如此,MRGeo在该类损坏上的平均表现仍有巨大提升(+19.93%),总体依然极具竞争力。表2:7种跨视角地理定位方法在CVACT val-C数据集上的实验结果。报告了每种方法在不同损坏类型下的R@1性能,以及所有损坏类型下的平均R@1_cor。
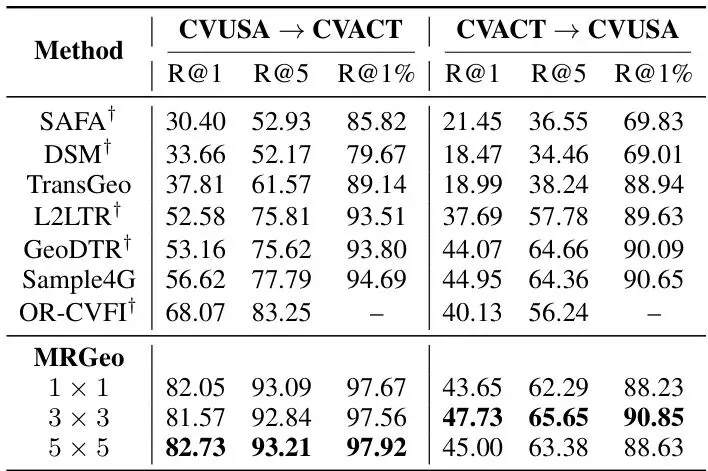
更令人印象深刻的是它的泛化能力。表4的“跨区域评估”实验,模拟了一个很实际的场景:在一个城市(如美国)训练的模型,直接拿去另一个城市(如澳大利亚)用,中间没有任何调整。
MRGeo的表现堪称“碾压”。无论是用CVUSA数据训练去测试CVACT,还是反过来,它的R@1都远远甩开其他所有方法。这证明了MRGeo学到的是一种更本质、更通用的特征表示,而不是对特定数据集分布的过拟合。表4:在CVUSA数据集上训练并在CVACT上评估,以及反之的跨区域评估。†表示使用极坐标变换的模型。底部显示了SARM中超参数k对跨区域评估的影响。深入剖析:各模块如何协同工作
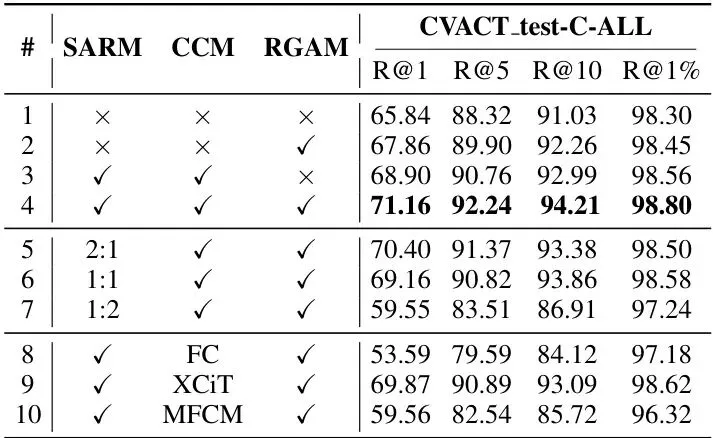
那么,MRGeo的三个核心模块到底各自贡献了多少?它们是怎么“打配合”的?消融实验(表3)给了我们清晰的答案。
1. 每个模块都有效:单独添加RGAM(第2行)或SCEB(第3行)都比基线(第1行)有提升。而三者结合(第4行)达到最佳性能,证明它们是互补的。
2. SARM的动态门控是关键:第5、6、7行尝试了固定比例的融合(如全局:局部=2:1, 1:1, 1:2)。结果发现,固定比例的性能都不如动态门控(第4行),而且局部特征比例越高(越脆弱),性能下降越厉害。这验证了自适应融合的必要性。
3. CCM设计优于简单方案:第8、9、10行用其他通道处理模块(简单的全连接FC、XCiT、MFMC)替换CCM,性能均不如原版CCM。这说明CCM对多粒度通道依赖的建模和补偿性校准是有效的。
它们的协同工作可以这样理解:SARM像一个前线指挥官,根据“战况”(损坏程度)动态调配“稳健兵团”(全局特征)和“精锐侦察兵”(局部特征)的力量。CCM则像后勤与装备部门,确保各个“兵种”(通道)的信息传递不因干扰而失真,并相互校准支援。最后,RGAM提供了一张不可违背的“作战地图”(几何结构),确保所有部队在正确的“战区”内行动,防止因情报混乱而攻错山头。
局限与展望:迈向更鲁棒的实用系统
尽管MRGeo取得了出色的成果,但论文也坦诚地指出了其局限性,这为未来的研究指明了方向。
极端情况下的挑战:如前所述,当图像对比度被极度降低(如变成几乎全灰)时,特征变得高度同质化,SARM和CCM的调节机制可能会失效。这是一个理论上的边界情况,但也提示我们,面对信息极度匮乏的输入,或许需要引入更高层次的先验知识或与其他传感器(如惯性测量单元)融合。
数据多样性:当前的鲁棒性基准测试主要基于模拟的损坏。真实的损坏可能更复杂、更复合(如下雨+运动模糊)。构建更贴近真实世界复杂损坏的数据集,将是推动该领域发展的关键。
实时性考量:MRGeo基于Vision Transformer (ViT)架构,虽然性能强大,但计算开销相对较大。在自动驾驶等对实时性要求极高的场景中,如何在保持鲁棒性的同时进行模型轻量化或设计更高效的架构,是一个重要的工程问题。
龙迷三问
Q1: 到底什么是跨视角地理定位(CVGL)?它有什么用?CVGL的核心任务是通过匹配地面拍摄的街景图像和对应的卫星图像,来确定拍摄地点的地理位置。想象一下,你拍了一张街景照片上传,系统能立刻在地图上标出你所在的位置,即使没有GPS信号。它在自动驾驶(GPS信号弱或失效时)、机器人导航、甚至调查取证等领域都有重要应用。
Q2: MRGeo这个名字是什么意思?MRGeo是论文方法的名称,它的全称可以理解为“面向损坏图像的鲁棒跨视角地理定位(Robust Cross-View Geo-Localization of Corrupted Images)”。其中“MR”可能寓意着“Multi-level Robustness”(多层次鲁棒性),或者直接指代其方法的核心“M”odular “R”obustness(模块化鲁棒性设计)。
Q3: 图像“损坏”具体指哪些情况?为什么会影响AI模型?本文研究的“损坏”包括三大类:1)天气影响:雨、雪、雾、霜等;2)运动模糊:相机抖动、物体快速移动导致的模糊;3)数字干扰:图像压缩(JPEG)、对比度变化、像素化等。这些情况会改变图像的像素值,抹除或扭曲关键的视觉细节,而许多AI模型(尤其是依赖局部细节的)是在干净数据上训练的,遇到这些“没见过”的损坏模式,自然就会表现失常。
如果你还有哪些想要了解的,欢迎在评论区留言或者讨论~龙哥点评
论文创新性分数:★★★★☆
论文是首个系统性地解决CVGL任务在图像损坏下鲁棒性问题的研究,问题抓得准,方向有价值。核心的“特征增强+结构约束”分层防御思想清晰。不过,SARM、CCM等核心模块的具体技术(如动态门控、多粒度通道建模)在计算机视觉其他领域已有类似应用,在此处的组合创新和应用更具亮点。实验合理度:★★★★★
实验设计非常扎实。不仅在与最新的SOTA方法进行广泛对比,还进行了详尽的消融实验、跨区域泛化测试,甚至分析了不同损坏类型下的表现。测试基于公开的鲁棒性基准,公平且可复现,结论可信度高。学术研究价值:★★★★★
价值很高。它成功地将鲁棒性研究这一重要议题引入了CVGL领域,为后续研究树立了一个强有力的基线。其分层处理(空间、通道、几何)的思路,对于其他视觉匹配、检索任务在恶劣条件下的鲁棒性提升,也具有很好的启发和借鉴意义。稳定性:★★★★☆
在论文测试的16种常见损坏类型和5种严重度下,MRGeo表现出了高度的稳定性,性能波动小,且普遍领先。其动态调节机制使其能适应不同程度的损坏。虽然在极端对比度损坏下略有不足,但整体稳定性优秀。适应性以及泛化能力:★★★★☆
跨区域评估的结果堪称惊艳,证明了其强大的泛化能力。这表明方法学到的不是数据集的“肤浅”特征,而是更本质的地理空间对应关系。对于不同地区、不同场景的潜在适应性很强。硬件需求及成本:★★★☆☆
模型基于ViT架构,计算和参数量相对传统的CNN模型要大。训练和推理需要一定的GPU算力支持。在资源受限的边缘设备(如车载嵌入式系统)上实时运行可能存在挑战,是产品化需要考虑的一点。复现难度:★★★★★
难度很低。论文描述清晰,代码已在GitHub开源,且使用了标准的CVGL数据集和评测流程。对于研究人员和工程师来说,复现和在此基础上进行二次开发的门槛很低。产品化成熟度:★★★☆☆
在特定场景下(如辅助自动驾驶定位)已展现出很高的应用潜力,鲁棒性和精度满足要求。但要达到完全成熟的产品化,还需解决实时性(轻量化)、处理极端罕见损坏、以及与传统GPS/IMU等多传感器深度融合等问题。可能的问题:方法在信息极度匮乏的极端损坏下(如极低对比度)性能会下降,这反映了纯视觉方法的理论局限。RGAM的固定网格划分可能对非标准视角(如倾斜拍摄的街景)的泛化性构成挑战,未来可探索更柔性的几何约束。Le Wu, Lv Bo, Songsong Ouyang, Yingying Zhu. MRGeo: Robust Cross-View Geo-Localization of Corrupted Images via Spatial and Channel Feature Enhancement. 2026.论文原文及开源代码: https://github.com/WLHASH/MRGeo*本文仅代表个人理解及观点,不构成任何论文审核或者项目落地推荐意见,具体以相关组织评审结果为准。欢迎就论文内容交流探讨,理性发言哦~ 想了解更多原文细节的小伙伴,可以点击左下角的“阅读原文”,查看更多原论文细节哦!

还在为你的AI模型在恶劣天气下“迷路”而烦恼吗?🤔 想和更多图像增强、自动驾驶领域的大佬交流如何让模型“风雨无阻”?
欢迎加入龙哥读论文粉丝群,
扫描下方二维码或者添加龙哥助手微信号加群:kangjinlonghelper。
一定要备注:研究方向+地点+学校/公司+昵称(如 图像处理+上海+清华+龙哥),根据格式备注,可更快被通过且邀请进群。