智平方创始人兼CEO郭彦东
在创业之前,郭彦东就拥有十分亮眼的职业经历 —— 他曾任职于微软西雅图总部担任研究员,回国后先后在小鹏汽车与 OPPO 担任首席科学家及研发高管,由他主导研发的各类智能系统,已在数十万辆智能汽车、数亿台消费电子终端、机器人以及微软 MaaS 等产品与平台中落地应用。正是这样的履历,让他更注重技术创新与产业落地并重,成为业内十分稀缺的 “AI + 智能硬件” 复合型专家。
2023 年初,郭彦东在深圳南山创立了智平方,致力于打造搭载 “具身智能大脑” 的新一代机器人。
多年的研发与管理经验让他深刻认识到,通用人工智能的未来并非只停留在算法层面的突破,而是要让智能机器人真正进入现实场景,承担人类不愿做、做不了的工作。而具身智能的核心竞争力,在于大模型的自主研发能力与持续迭代效率。
基于此,智平方将自身定位为AGI 原生的通用智能机器人企业,与特斯拉一样,是行业内少有的、专注于生产力型通用智能机器人的研发、生产与服务提供商,聚焦于生产力级通用智能机器人这一颠覆性智能终端品类,而非娱乐表演类机器人。
当行业内大多数具身智能企业还停留在实验室原型阶段,要么偏重算法研究,要么专注硬件落地时,郭彦东带领团队跳出了单一维度突破的局限,确立了全栈自研、算法驱动硬件的技术路线,从公司成立之初就坚持端到端大模型的技术范式。早在 2023 年,全球创业公司中只有特斯拉机器人与智平方选择了这条技术路径,这一点也被资本市场看在眼里。
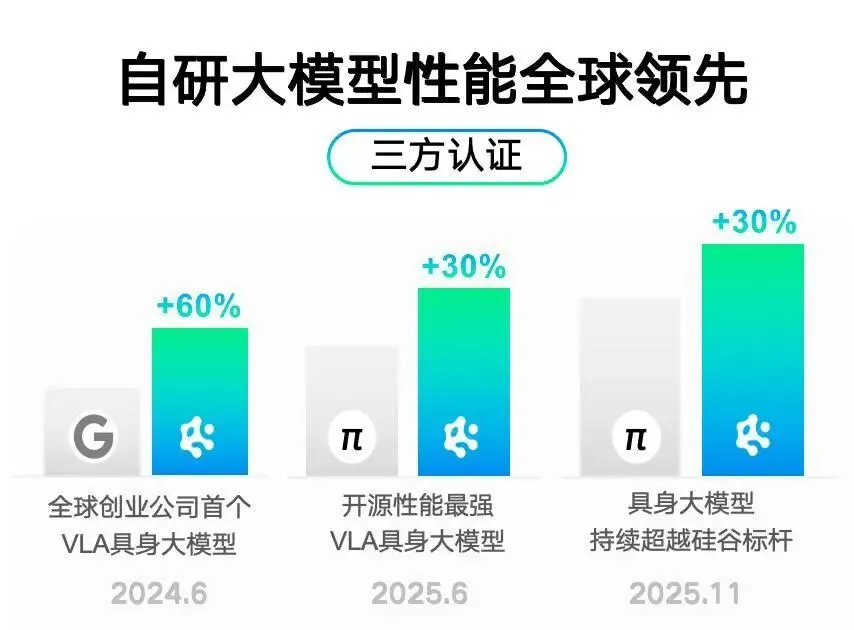
此后,在行业尚未形成统一共识之时,智平方便提前布局 VLA 架构,而非直接使用开源方案,自主研发出全球首个全域全身 VLA 大模型 GOVLA,实现了从桌面场景到开放环境、从单臂操作到全身协同、从简单执行到长程推理的跨越式升级,并持续迭代优化:
GOVLA 0.0(RoboMamba)在模型参数量仅为谷歌同类模型 1/20 的条件下,性能提升超过 80%,还得到了图灵奖得主杨立昆(Yann LeCun)的关注;
在此基础上,智平方进一步推出融合快慢系统的重磅开源模型 GOVLA 0.5(FiS‑VLA),成为业内首个支持 “异构输入 + 异步频率” 的双系统 VLA 模型,并创新性提出双系统感知协同训练方案,重新定义了机器人 “又快又聪明” 的实现路径;