《触觉感知与离电传感电子皮肤技术》讲座全文整理
开篇引入:触觉的重要性
结合生活感受来说,患上过敏性鼻炎后嗅觉减退,吃饭会觉得味道变差;但如果失去触觉,带来的影响会截然不同。触觉是人类五大感官中至关重要的一种,平日里我们常常忽略它,可一旦缺失,各类问题便会接踵而至。
临床上有大量糖尿病患者,因神经病变导致触觉丧失,做事没有轻重分寸,身体受伤后不仅难以察觉,伤口恢复速度也远低于常人,会进一步加重病情。
触觉还有一个独一无二的特点:感知与反馈高度结合。视觉只是单向接收信息,物体不会对我们产生反向作用;但触觉是双向交互,当我们触碰物体,物体会反过来对我们形成力的反馈,这也是人与人之间亲密互动的核心依托。
人体感知触觉的器官是皮肤,成年人皮肤总面积约 2 平方米,每平方厘米都分布着大量感知感受器,指尖区域的感受器密度更是极高,赋予了人类丰富的外界交互能力。
一、皮肤触觉感受器分类与相关研究背景
人体依靠皮肤内的感受器感知万物,这些感受器主要分为两类:
- 快适应感受器
- 慢适应感受器
两类感受器协同工作,让我们既能捕捉力的动态变化,也能识别恒定的作用力。
正因多位科学家厘清了触觉感受器的作用机理,相关研究斩获2021 年诺贝尔生理学或医学奖。依托触觉,我们可以分辨物体纹理、压力大小、温度高低、重量、外形等,盲人也能凭借细腻的触觉精准辨识物体。
当下产业界热门的具身智能机器人(人形机器人),能否拥有类人触觉,成为技术落地的关键。现阶段的人形机器人普遍缺少完备触觉功能,出于安全考虑,无法让其照料老人、孩童。
很多人误以为视觉可以解决所有问题,实际并非如此。举例来说,人站立时,肉眼无法判断脚趾、脚后跟的受力差异,身体微小的姿态调整就会改变受力分布,这类细微的力变化,只有触觉能够精准感知。这也是足部检测机构除视觉外,也需要依托力学检测的原因。总而言之,缺少触觉,人形机器人就难以真正走进家庭、落地实用服务。
二、触觉传感器主流类型与发展历程
想要让机器人拥有触觉,核心是研发对应传感器,物理材料、电学元件是传感器研发的基础,主流触觉传感器分为三类:
- 压阻式传感器
- 电容式传感器
- 压电式传感器:材料受压后内部正负电荷分离,进而产生电压。该类传感器存在明显短板:仅能感知力的动态变化,无法检测静态压力,应用场景受限。
本次讲座主讲团队深耕离电传感领域,下面梳理触觉传感器整体发展脉络:
- 19 世纪下半叶
- 约八九十年前:发现金属应变片,金属被拉伸后电阻会发生改变,且形变可恢复,但电阻变化范围极小,常规使用四片应变片组合工作;
- 后续发展:发现硅等半导体材料压阻效应显著,受压后电阻变化幅度大,适用于压力传感;
- 上世纪 70 年代
- 技术分水岭:传统传感器均为硬质材料,和人体柔软的皮肤差异巨大,行业开始探索柔性电子皮肤。
柔性电子皮肤发展关键节点
- 2004 年及更早:柔性材料开始应用于传感领域,柔性电子皮肤雏形出现;
- 2010 年:斯坦福大学鲍哲兰团队采用全柔性、可拉伸材料制作传感器,通过内部微结构优化传感效果;
- 2012 年:离子型传感器被提出,相关研究者如今任职于深圳大学城;
- 2019 年:麻省理工学院(MIT)将 AI 与电子皮肤结合。人类可以依靠过往触觉经验识别物体,而传统电子皮肤仅能输出原始信号,借助 AI 学习,可让传感器具备物体识别能力;
- 2020 年:本课题组发布重要研究成果,大幅提升柔性传感器灵敏度,性能超越传统硬质传感器;
- 2022 年至今:具身智能技术受到广泛重视,柔性传感器走向规模化研发与产业化,团队进一步优化传感器的数据稳定性。
三、离电传感器:原理、优势与技术突破
(一)传统电容传感器的痛点
传统柔性电容传感器结构为两层电极 + 中间柔性介质层,依靠介质层受压变薄改变电容实现传感。为提升压缩性能,业内会在介质层中设计含空气间隙的微结构,利用空气易压缩的特性放大信号。
但该方案存在局限:材料厚度变化幅度有限,信号变化微弱,传感器灵敏度不足;且传统电容传感器电容值小,极易被环境寄生电容干扰,尺寸做到 5 毫米以下信号就会严重衰减。
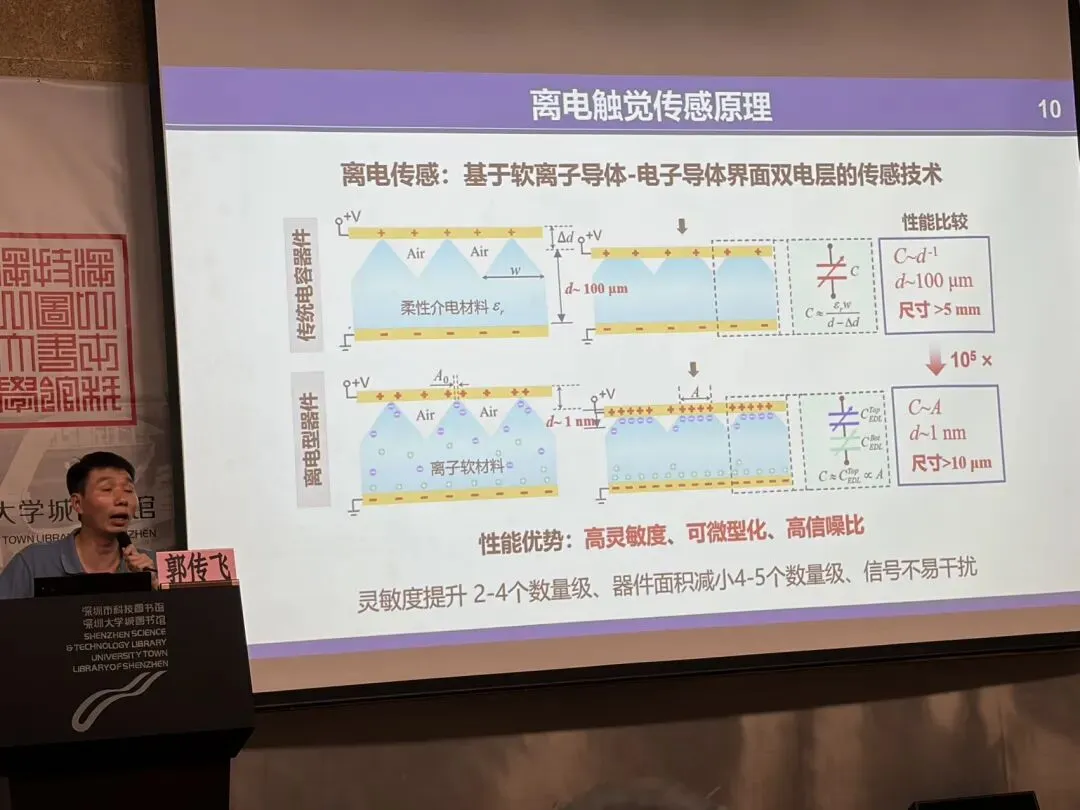
(二)离电传感器核心原理与核心优势
将传统电容的介质层替换为离子型材料,电极与离子材料界面会形成原子级间距的电容结构。根据电容特性,极板间距越小电容越大,该设计带来多重优势:
- 灵敏度跃升
- 微型化能力强
- 抗干扰性佳
(三)行业共性难题:灵敏度与量程的矛盾
物理领域存在普遍规律:设备精度越高,测量量程越小,二者难以兼顾,如同高精度天平无法称重人体体重、体重秤分辨不出头发重量。
传统传感器也受此限制:低压状态下灵敏度尚可,压力增大后便无法精准感知。而本团队研发的离电传感器打破了这一局限,在高压环境下,灵敏度仍优于常规传感器的低压表现,既能检测极微小的作用力,也能适配大压力场景,可识别吊兰叶片轻微震动这类微弱信号。
(四)软材料粘弹性问题:蠕变与迟滞
柔性材料为了模拟人体皮肤,必然具备粘弹性,这是柔性传感器测不准数据的核心原因,主要分为两大问题:
- 蠕变:持续施加静态压力,材料会不断发生形变,力与形变无法一一对应,造成信号漂移,静态压力检测失准;
- 迟滞:外力撤除后,材料无法立刻恢复原始形态,形变会缓慢留存,导致信号滞后、数据失真。
通俗举例:口香糖、湿滑的黄鳝体表都存在这类特性,分子间粘性会带来能量耗散。弹性是传感器精准检测的基础,而粘性会直接干扰检测结果,这也形成行业矛盾:想要材质柔软贴合皮肤,就会产生粘弹性、数据不准;想要数据精准,又无法实现柔性特性。
(五)材料创新:解决静态压力检测难题
团队自主合成新型双链段离子材料,针对性破解粘弹性问题:
- 导电离子链段:将离子束缚在分子链上,避免离子、水分流失,保证电学性能长期稳定,维持高灵敏度;
- 中性润滑链段:在材料内部引入润滑结构,削弱分子间相互作用、减少能量耗散。
该材料大幅抑制蠕变现象,传感器信号稳定性显著提升,能够精准检测静态压力。依托该材料,传感器还拓展出无线传感、扭矩传感等功能,应用场景进一步拓宽。
(六)动态响应优化:提升响应速度、消除迟滞
- 行业原有水平:鲍哲兰团队的微结构传感器,将动态响应速度从 1 秒提升至 10 毫秒(100Hz),可满足多数常规场景;
- 现存瓶颈:微结构类似弹簧,在 100Hz 以上高频场景中,软材料的界面粘性会导致结构粘连、能量损耗,迟滞现象加剧,响应速度无法继续提升,加载、卸载信号偏差明显;
- 解决方案与成果:优化界面结构,降低分子粘连与能量耗散,传感器响应速度提升至 12500Hz,覆盖人声、乐器等全音频频段,加载与卸载曲线基本重合,迟滞近乎消失。
团队选用聚丙烯酸酯类材料,发现材料中性链段的碳原子数量是关键:碳原子数为 3 时,分子链间相互作用降至最低,形变恢复速度最快、迟滞最小。
基于该材料打造的离电应变传感器,性能表现突出:可承受 100% 拉伸形变;应变率可达 5000%/ 秒,能捕捉爆炸、冲击类超快速形变;可精准记录 13 毫秒的弹指动作等极速人体动作,无检测误差。依托该传感器,还能同步采集人体动作数据,复刻到机械手、人形机器人上。
(七)前沿进展:同步抑制蠕变与迟滞
蠕变和迟滞同属粘弹性行为,二者存在耦合关系:单一指标做到极低时,另一项指标会变差,很难同时优化。目前团队已有未发表的阶段性成果,通过调控分子尺度与作用时长,实现蠕变、迟滞双双降至可忽略的极低水平。
四、传感器多场景应用落地
(一)机器人与智能交互领域
- 物体识别:集成触觉传感器的机械手,可精准分辨不同布料、区分物体软硬,识别精度超越人手;
- 医疗检测:研发手持式眼压检测设备,检测结果与医院大型专业设备基本持平,解决传统便携设备精度不足的问题;
- 行为意图识别:通过触觉信号判断人体动作意图,例如区分正常抓握、即将摔倒时的应急抓握,可应用于陪护机器人、养老辅助设备;
- 大面积电子皮肤:研发含 1 万个传感点位的大面积电子皮肤,可完整复刻印章图案等压力分布。
- 数据读取优化:采用频率编码技术,10.6 毫秒即可完成 1 万个点位的数据读取;
- 数据压缩技术:将海量数据压缩数百倍,且不丢失有效信息,保障交互识别效果。
(二)AI 赋能:智能逆向设计传感器
传统传感器研发依靠学生反复试错,周期极长,一名学生在读期间往往仅能完成单一材料、单一结构的研发。为提升效率,团队引入人工智能技术:
- 搭建小数据 AI 模型(柔性传感领域行业数据总量有限,无法使用大数据模型);
- 实现逆向设计:输入目标性能参数,AI1 秒内可输出 1000 组可行的材料与结构方案,经实验验证全部达标。该方法为业内首次实现 AI 智能设计电子皮肤敏感结构,大幅缩短研发周期。
(三)航空领域:智能蒙皮与风洞检测
飞机设计的核心是检测机翼表面压力分布,传统方案需要在机体打孔植入传感器,存在点位少、薄壁 / 异形区域无法安装、仅能检测正压等缺陷。团队开展航空智能蒙皮研发,与航空动力研究院深度合作:
- 压力检测能力:通过预压力结构设计,可检测 **-0.8 个大气压负压至 6 个大气压正压 **,检测数据与商用高精度传感器高度重合;
- 飞机失速监测:飞机仰角过大易引发失速事故,传统管式传感器存在阻力,信号失真;本款传感器可捕捉压力的细微波动,精准预判失速风险;
- 测试能力迭代:目前可完成 80m/s、110m/s 风速测试,未来计划向超音速场景拓展;
- 单传感器正负压通测:联合西安交通大学,采用非对称双腔体结构,单支传感器可实现 **-1 个大气压至 3 个大气压 ** 连续正负压检测,完整还原飞行器起飞、飞行、降落全流程压力变化。
(四)医疗健康:触觉修复、远程触觉交互与植入式器械
1. 触觉修复(两大应用方向)
- 假肢触觉反馈:现有技术可通过肌电信号控制假肢动作,但假肢无法向人体传递触觉。团队采集无运动伪影的高质量肌电信号,在假肢表面集成电子皮肤,搭建 “意念控制 - 触觉感知” 闭环,让使用者感知假肢触碰的物体;
- 糖尿病周围神经病变(DPN)修复:全球约 2 亿患者因神经损伤触觉衰退,易发生烫伤、外伤。团队联合深圳市第一人民医院开展临床研究,电子皮肤贴附于人体表面,将压力信号转化为电刺激,30 例临床试验证明,可将患者力觉感知能力提升数十倍,接近正常人水平,同时实现温度感知修复。
2. 远程触觉交互(元宇宙 / 异地交互)
现有视频、语音仅能实现视觉、听觉远程传输,无法传递触觉。团队实现跨区域触觉交互:一方的触摸信号通过手环、无线网络传输至另一端,再通过电刺激还原触觉感受,支持双向交互,填补远程触觉的技术空白。
3. 植入式医疗器械(攻克高湿度难题)
离电传感器的离子材料亲水性强,在人体体液高湿环境下性能易失稳。团队研发湿度不敏感新型聚合物材料:材料液态阶段为高极性(兼容离子),固化后转为非极性、疏水特性,力学与电学性能不受湿度影响,适配人体植入场景:
- 膝关节置换监测:植入传感器检测关节压力分布,及时发现压力不均问题,降低假体磨损与二次手术概率;
- 冠脉 FFR 检测:冠脉狭窄检测是判断是否植入心脏支架的关键,商用检测导管单价高达 2-3 万元。团队将传感器集成至百元级普通导管,检测精度对标高端设备,大幅降低医疗成本;
- ICU 心肺监测设备:传统设备体积庞大,本方案将设备缩小数百倍,同时提升检测精度,可捕捉商用设备无法识别的高频信号,实现压力、温度原位无损检测。
目前,团队也是全球范围内较早开展植入式离电传感器研究的团队,相关技术已启动产业化落地。
结尾致谢
本次研究成果的取得,离不开团队全体学生的辛勤付出,大家长期加班攻坚,是技术突破的核心力量;同时也感谢国家、广东省、深圳市各级科技基金与项目的大力支持。本场讲座到此结束,接下来进入嘉宾与听众互动环节。