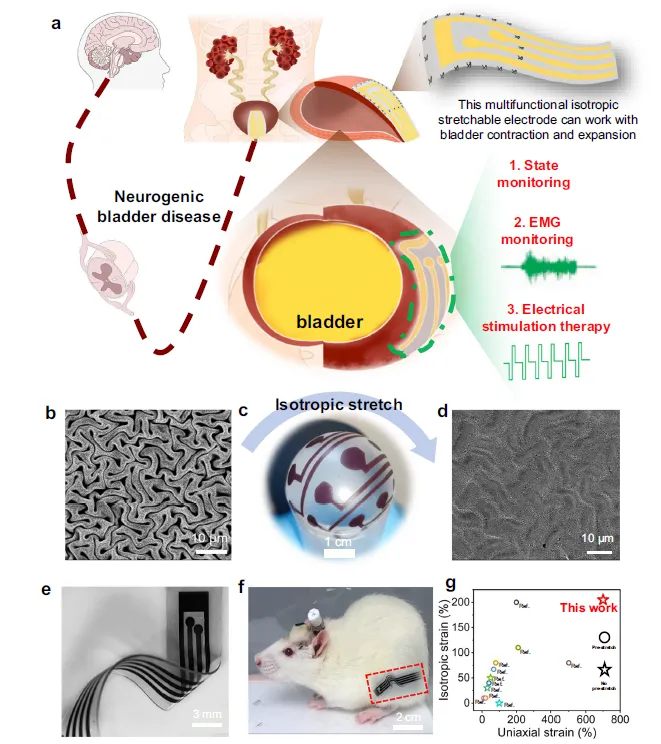
本研究首先从器件构型出发,提出了一种面向神经源性膀胱治疗的软性植入式膀胱-机器界面。该系统并非单一传感器,而是将膀胱形变监测、逼尿肌肌电记录和局部电刺激治疗整合在同一柔性薄膜平台上,使器件能够随膀胱壁同步扩张与回缩,同时维持电学功能完整。为实现这一目标,研究并未沿用传统需要对弹性基底进行预拉伸的策略,而是通过在选定的软聚合物基底表面热蒸镀金膜,构建出一种具有独特表面形貌和嵌入式导电网络的可拉伸导电薄膜。文中给出的制备路径较为清晰:首先将弹性体基底配制并旋涂成约200–300 μm厚的柔性膜层,随后按照预设图案蒸镀400 nm厚金层,并在后续退火与封装步骤后完成器件构建。这样的工艺一方面保证了图案化精度和可加工性,另一方面也为后续实现大尺度形变适配奠定了材料基础。
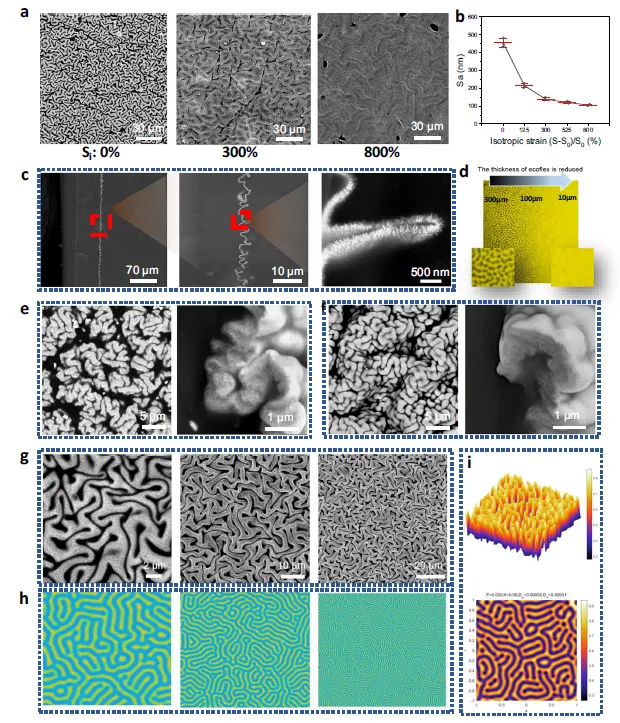
在材料形貌层面,本研究的一个关键结果是获得了周期性沟槽状表面结构,而这一结构正是器件实现超高可拉伸性的物理基础。扫描电镜显示,导电层表面呈现规则的起伏褶皱,峰谷距离约为2.5 ± 1 μm;横截面进一步表明,该导电层并非简单铺展在基底表面,而是由金纳米针结构与弹性聚合物共同组成的复合层,提示蒸镀过程中金纳米团簇并不是停留在最外表,而是逐渐“嵌入”了软基底表层。研究进一步提出,这种特殊形貌来源于热蒸镀过程中局部热不稳定性与软聚合物链向表面迁移之间的耦合效应,并借助Turing pattern相关理论对其进行了物理解释。也就是说,该器件的高延展性并非仅仅依赖后期机械变形,而是源于材料形成阶段即被“写入”的微观结构。这一点非常重要,因为它说明器件的高性能不是后处理附加出来的,而是由制备机制直接决定的。
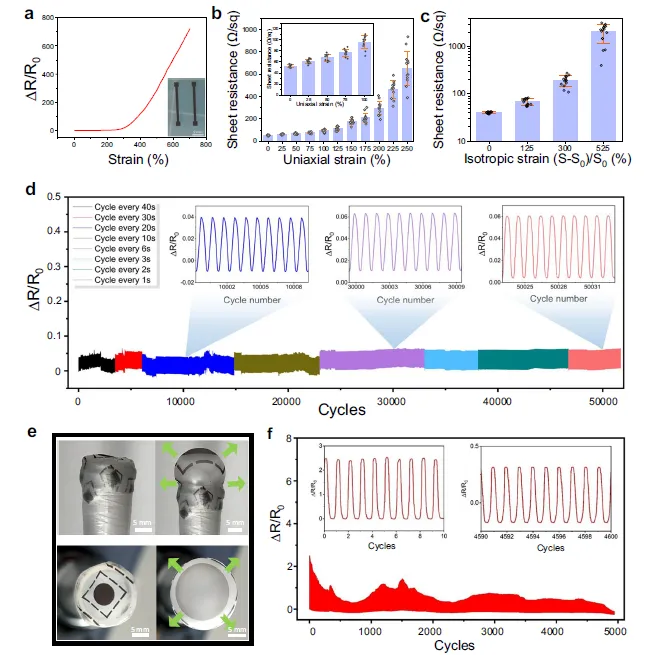
在电机械性能验证方面,本研究给出了较为充分且有说服力的数据。以500 μm宽电极为例,该电极在单轴拉伸至700%后仍可保持导电和附着稳定;在各向同性拉伸测试中,器件的极限形变能力超过800%,显著优于既有同类各向同性电极。更具体地说,在单轴拉伸下,电极片电阻在100%应变以内变化较小,超过200%后才开始明显上升;在各向同性拉伸中,片电阻在125%、300%和525%形变时分别约变化0.8倍、2.1倍和24倍。虽然高应变下电阻不可避免升高,但在与膀胱生理充盈相关的形变范围内,该器件仍表现出可接受且稳定的信号输出。进一步的循环实验显示,器件在200%应变下经50,000次循环拉伸后依然保持较好的电学稳定性;在约250%各向同性应变条件下,也可维持5000次循环。此外,阻抗测试和交流刺激测试提示其在长期放置及反复电刺激后依旧能够保持可用性能。这些结果共同表明,该器件真正解决了“能拉伸”和“拉伸后还能稳定工作”这两个不同层面的难题。
对于其高可拉伸性的形成机制,本研究并未停留在现象描述,而是进行了较深入的结构—性能关联分析。研究发现,当各向同性应变从0%提升至300%再到800%时,表面沟槽结构逐渐被拉平,但在800%以内并未出现明显贯穿裂纹,这意味着导电层可通过沟槽展开来吸收大部分外加变形,而不必立即依赖裂纹释放应力。相比之下,传统微裂纹型金膜在各向同性拉伸时更容易产生贯穿性裂缝,将导电层切割成彼此分离的“岛状结构”,从而迅速失去电连续性。研究还发现,较厚的软基底更有利于自发形成沟槽,而过薄基底会因底部约束削弱聚合物链迁移,难以形成同类表面形貌;与此同时,金膜厚度和蒸镀速率也会影响褶皱尺寸和导电连续性。这种系统化分析使材料设计逻辑更加完整,也说明本研究所提出的方法并非偶然得到某一高性能样品,而是具备一定的机制可解释性与工艺可推广性。
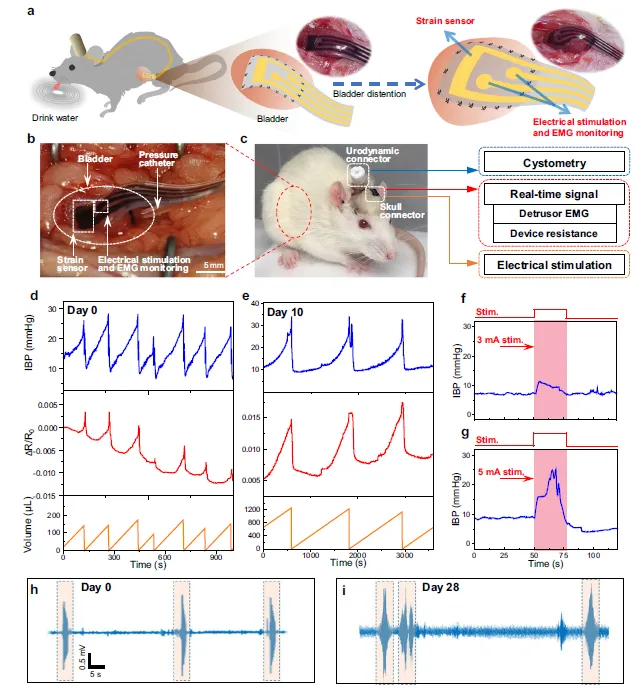
在体内应用层面,研究进一步构建了用于长期植入的完整器件体系。其有效工作区面积约为4.6 mm × 6 mm,包含一个被保护层封装的可拉伸应变传感模块,以及两个裸露区域用于逼尿肌肌电采集和电刺激输出。器件植入膀胱表面后,又通过颅骨连接端口建立了两条信息通路:一条用于电信号采集和刺激输出,另一条用于传统尿动力学压力监测。这样的系统设计非常关键,因为它使研究者能够在同一动物体内同步记录膀胱内压、器件电阻变化和逼尿肌肌电活动,从而直接比较器件信号与真实膀胱生理事件之间的一致性。健康大鼠实验显示,随着膀胱逐渐充盈,贴附于膀胱顶部的器件发生明显且均匀的各向同性形变,过程中未见撕裂、脱落或明显位移,表明其具有良好的顺应性与贴附稳定性。
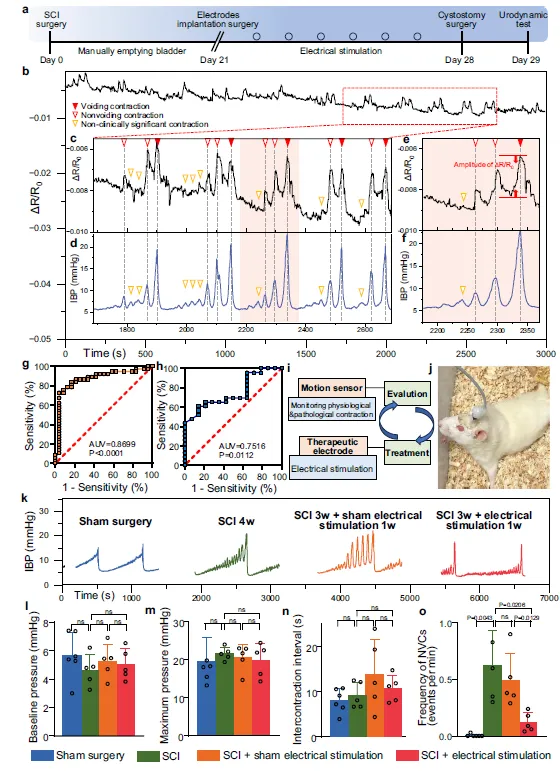
在功能验证方面,本研究首先在健康动物中证明了该系统的实时监测与干预能力。连续记录结果显示,无论是在植入当天还是植入后第10天,膀胱内压、器件电阻变化与膀胱充盈体积之间均呈现稳定对应关系:储尿过程中,传感模块电阻逐渐升高;排尿反射发生时,伴随膀胱收缩与排空,电阻出现快速变化并恢复。与此同时,器件还能够在植入当天及第28天记录到与排尿事件相对应的逼尿肌肌电信号,说明其不仅能“看见”膀胱形变,还能“听见”逼尿肌电活动。电刺激实验则进一步表明,该界面具备有效输出能力:在急性条件下,采用50 Hz、500 μs脉宽、3 mA刺激时,可使膀胱压较7–9 mmHg基线增加约4.2 mmHg;当电流提高至5 mA时,压力升高约15.9 mmHg;而1–2 mA仅引起较弱反应。虽然这种刺激尚不足以直接诱发有效排尿,但已经能够清楚证明器件对膀胱收缩具有可控调节作用。从结果上看,这一步完成了从“可植入材料”到“可操作生物电子系统”的关键转变。
本研究更具临床意义的部分在于,它并未满足于健康膀胱中的信号记录,而是进一步在脊髓损伤诱导的神经源性膀胱模型中评估器件对病理性膀胱活动的识别能力。研究采用经典SCI模型,并在损伤后第21天植入器件,第28天进行膀胱造瘘,第29天开展尿动力学分析。通过同步记录器件电阻与膀胱内压变化,研究将膀胱收缩事件区分为排尿收缩、非排尿收缩以及临床意义不大的轻微收缩三类。结果显示,器件电阻变化峰值与膀胱内压峰值在时间上具有良好一致性,因此研究者进一步将归一化电阻变化幅度作为诊断指标,构建了基于ROC分析的识别模型。结果表明,该指标区分“具有临床意义的收缩事件”和“无临床意义收缩”的AUC达到0.8699,最佳截断值为0.001075,特异度为91.67%,敏感度为72.97%;进一步区分排尿收缩与非排尿收缩时,AUC为0.7516,最佳截断值为0.001290,特异度和敏感度分别为85.71%和56.52%。这说明该器件不仅能作为单纯的形变传感器使用,更具有一定程度上的病理事件识别能力,为后续“检测—判断—触发治疗”闭环策略提供了依据。
在治疗评价部分,本研究进一步验证了局部电刺激对神经源性膀胱过度活动的干预效果。SCI动物被分为假手术组、SCI组、SCI+假刺激组和SCI+电刺激组,并从损伤后第21天开始进行为期7天的每日刺激治疗。刺激参数设置为0.2 ms方波、20 Hz、60 min,电流强度控制在0.5–2 mA的耐受范围内。结果显示,与假手术组相比,SCI动物的非排尿性收缩频率、膀胱重量以及膀胱/体重比值显著升高,证明模型构建成功。更重要的是,在基线压力、最大压力和收缩间隔等总体尿动力学参数无明显差异的情况下,接受电刺激的SCI动物其非排尿性收缩频率显著下降,并接近未损伤动物水平;而假刺激组则未见同等改善。进一步分析还表明,电刺激主要降低的是非排尿性收缩的发生频率,而不是单次收缩的振幅。这提示该装置的治疗作用更可能体现在抑制异常反射性收缩的出现,而非简单削弱膀胱肌的收缩强度。换言之,本研究所实现的是对病理性膀胱活动节律的调节,而这恰恰是神经源性膀胱治疗中的关键目标之一。
从讨论角度看,本研究的意义并不仅在于做出了一种“能拉得很大”的柔性电极,更在于完成了材料创新、器件集成、体内监测与治疗验证之间的闭环。其技术优势主要体现在三个层面。首先,在材料与制造层面,该研究通过无预拉伸工艺获得了超高各向同性延展性,避免了传统预拉伸方法中常见的模量失配、图案畸变和起皱失控问题。其次,在功能层面,该系统在一个柔性界面上实现了膀胱内压相关形变监测、逼尿肌EMG记录和电刺激输出的整合,使器件从“单模态检测”提升为“多模态诊疗平台”。再次,在疾病模型层面,研究没有仅停留在短期急性实验,而是通过SCI模型展示了该系统对病理性收缩事件的识别和干预能力,这使其更接近真实临床场景。尤其值得注意的是,研究还进行了加速老化测试,结果显示老化前后器件表面形貌变化不明显,阻抗变化小于5%,拉伸导电性仅下降约10–15%,从侧面支持了其稳定性。
当然,本研究也保留了进一步拓展的空间。当前器件已经能够有效诱发膀胱压上升并降低非排尿性收缩频率,但尚未实现真正意义上的协调排尿。文中据此指出,未来需要考虑将膀胱刺激与外尿道括约肌松弛协同起来,并探索更优的刺激参数和多电极阵列设计,以实现更大范围、更具时空协调性的逼尿肌招募。此外,虽然现阶段仍借助了传统膀胱压力监测进行验证,但研究已明确提出,希望最终以变形传感替代压力监测,实现更简化、患者友好的诊断与干预体系。总体而言,本研究证明了一种软性膀胱-机器界面不仅可以在大幅各向同性变形环境中长期稳定工作,还能够对神经源性膀胱的异常活动进行实时识别与局部电刺激调控。其真正的创新价值,在于把柔性材料学、可植入生物电子学和神经泌尿调控有机结合起来,为慢性膀胱疾病的个体化闭环治疗提供了扎实的实验依据和清晰的技术方向。




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
