指尖轻轻一触,你就能分辨出苹果的爽脆、面包的松软,或是丝绸的细腻——这看似简单的感知,却是人类皮肤数百万年进化的精妙之作——人类指尖每平方厘米分布着约240个触觉感受器,能同时捕捉压力、纹理、软硬等多维信息并瞬间传递给大脑,形成精准的“触觉画像”。
如果为机器人赋予这样的“指尖触觉”,甚至更敏锐的感知,世界会怎样?想象一下:在水果店,它是轻轻一碰,就能为你挑选出那颗熟度完美水果的“魔杖”;在医院,它是能通过组织硬度的细微差异,在肉眼或内窥镜都无法“看到”的时候,为“未发之疾、初起之症”进行早期诊断的“金手指”;在博物馆或拍卖会上,它是凭借对材质与微痕的精准感知,辅助鉴定文物、艺术品真伪的“时空触手”……
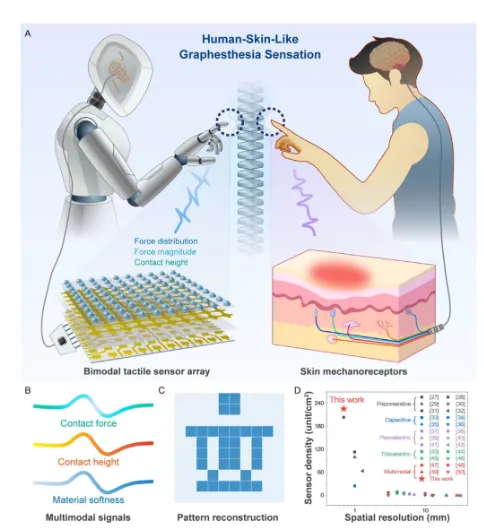
一项来自香港科技大学(广州)的突破性研究,正尝试将这份“指尖智慧”变成现实。近日,港科大(广州)功能枢纽可持续能源与环境学域訾云龙教授团队在国际顶尖期刊《Advanced Materials》上发表了最新研究成果,其团队成功研制出亚毫米级分辨率的双模态触觉传感器阵列。该技术首次实现了对物体表面软硬度分布的精细触觉感知,使机器人系统获得了接近人类指尖皮肤的感知与辨析能力。
訾云龙教授团队在国际顶尖期刊《Advanced Materials》上发表最新研究成果。
论文作者:
何少帅,博士生,香港科技大学(广州)
周宇,助理教授,复旦大学(此前为香港科技大学研究助理教授)
孙圣书,博士生,北京301解放军医学院
龙正浩,助理教授,复旦大学(此前为香港科技大学博士后)
陈凤仪,博士生,香港科技大学(广州)
戴金鸿,博士生,香港科技大学(广州)
夏欣,副教授,大连理工大学
万冬,博士生,香港科技大学(广州)
范智勇,讲座教授,香港科技大学
訾云龙,副教授,香港科技大学(广州)
“人类通过五感认知世界,机器要走向真正的智能,也需要模拟这些感官。”訾云龙说,“目前,仿生视觉和听觉已相当成熟,但触觉的精细复现,仍是亟待突破的‘深水区’。”
自港科大(广州)成立之初,訾云龙团队便启动了这项仿生触觉研究
现有触觉传感器长期面临一个困境:高分辨率与多模态感知难以兼得。高分辨率传感器往往只能测量单一信息(如压力),而多模态传感器又常因结构复杂导致尺寸偏大、精度受限。此外,基于压电、摩擦电等自供电机理的传感器,信号串扰严重,阻碍了信息的精准解码。
团队决心攻克这一瓶颈。“机器人看到一个苹果并抓取,但它抓回的可能是塑料模型。”訾云龙举了一个生动例子,“真苹果含水,质地与塑料苹果不同;生香蕉与熟透的香蕉,软硬也天差地别。”因此,他们选择从“软硬度”这一关键物理属性切入,为机器人增添一个辨别真伪、判断品质的全新感知维度。
自港科大(广州)成立之初,訾云龙团队便启动了这项仿生触觉研究,至今已历时三年半,来自港科大(广州)的博士生何少帅是团队主力的研究者之一。
团队从昆虫触觉感受器(钟型感受器)的结构中获得灵感,提出了一种双模态智能触觉传感器(bimodal intelligent tactile sensor, BITS),其基于摩擦电效应,在自供能的条件下,同时实现材料种类、材料柔软度识别和量化弹性模量。该传感器设计为半球顶的结构,利用与不同柔软度物体的接触面积不同而产生的电压信号幅度不同,结合力学赫兹接触理论(Hertz contact model),可以实现材料柔软度识别和量化弹性模量。
2024年7月,该研究曾以“Biomimetic bimodal haptic perception using triboelectric effect”为题发表在《Science Advances》上。
然而,訾云龙教授团队并未止步于此。此前在《Science Advances》上发表的成果,虽已实现了材料种类识别率99.4%、材料软硬度识别率100%的准确率,并制作出单个触感器在5毫米级的阵列集成,但团队清醒地意识到:要赋予机器人真正灵巧的“智能指尖”,必须在传感器的微型化与集成度上继续突破。
“指纹的间距大约在一毫米以内。触感器要做到这个尺度以内,才能感知如指纹般精细的纹理。”訾云龙指出。这意味着,研究需进一步迈向亚毫米级的阵列集成,让机器人不仅能判断软硬,更能“触摸”到物体表面的微观纹理与图案。
“在港科大(广州),我们不仅要以科学家思维发现问题、提供解决方案,更要以工程师思维交付‘实际可用的样品’,让科研与工程贯通,才能让实验室研究走向真实的应用场景。”訾云龙说。
然而,尺寸每缩小一步,工艺难度便呈指数级增长。“制备工艺是最大的困难。”何少帅坦言。这个传感器阵列需要做到“平面与曲面的精密结合”,团队需要将上百个微米级的“小手指”(传感单元)排列整齐,每个单元都要独立连接压电与摩擦电两层信号线,总计两百余根导线,且绝不能互相串扰。“这就像在一个极小面积内进行超精密的‘布线手术’。”何少帅说。
材料选择与工艺调试更是犹如迷宫。仅为了找到适合制造微柱阵列基底的材料,团队就迭代了十几种配方,从热固化到光固化,经历了上百次失败。
是什么支撑团队走过反复试错?訾云龙认为,关键在于“看到希望的微光”。“哪怕最初只能手搓出一个粗糙的样品,但只要核心功能被验证可行,后面的路就是不断优化。” 他表示,导师的作用之一,是帮助学生判断某个难点是“可攻克的技术挑战”,还是“必须绕行的理论死胡同”,从而培养学生的风险判断与科研管理能力。
港科大(广州)跨学科的环境为这场精密攻坚提供了关键支撑。“学校的优势在于,不同领域的师生很自然地交流协作,学科壁垒被主动打破。”訾云龙说。这促使团队跳出单一领域的思维定式——不再局限于研发更高灵敏度的新材料,而是通过融合学科视角,系统性破解集成难题。
“学校倡导的融合学科理念、充足的资金支持和共享实验室资源,为我们的研究提供了坚实的基石。”何少帅补充道。团队虽然大多只是材料学背景,但通过大学跨学科学习与协作,他们补全了微电子等相关知识,并与人工智能、智能制造等学域的师生紧密合作,不断优化传感器设计,逐步实现了从宏观器件到微米级器件的跨越。
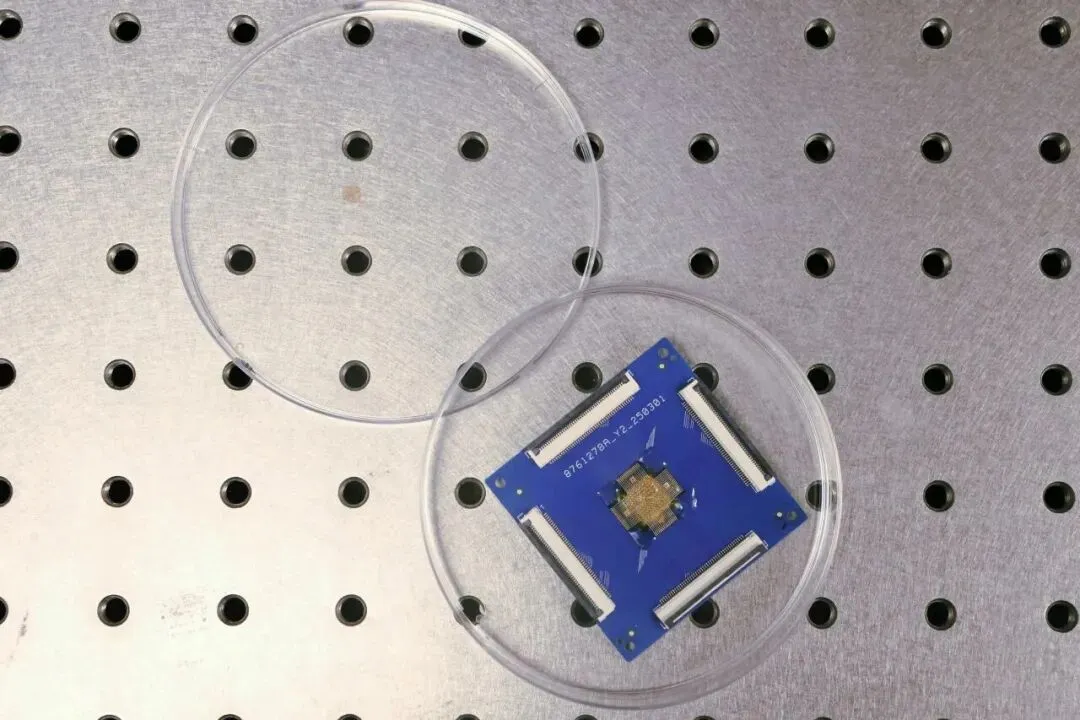
研究团队完成了亚毫米级分辨率双模态智能触觉传感器的关键跨越
最终,通过将皮秒紫外激光精密加工与高精度3D打印等尖端制造技术进行创新融合,并攻克了相应的工艺集成难题,团队成功实现了触感器单元的微型化,将单个触感器尺寸从此前的5毫米缩小至0.35毫米,完成了亚毫米级分辨率双模态智能触觉传感器的关键跨越。
性能的稳定与提升,为技术转化铺平了道路。这项兼具“亚毫米级分辨率”与“双模态感知”的技术,打开了极具想象力的应用空间。
最直接的应用是高安全性产品的溯源与防伪。“我们可以在产品表面,用肉眼乃至光学设备都无法识别的微小软硬度差异,制作一个独特的‘物理指纹’。”訾云龙描述道,“专用设备或机器人一摸,便能读取信息,实现极难仿造的真伪验证。”
在智能家居与工业分拣中,机器人将能真正实现“择优而取”——从一堆水果中精准挑出成熟度最佳的一颗,或在一批外观相同的物品中识别并抓取特定目标。
医疗健康是另一个充满前景的方向。如果将其应用于内窥镜,通过感知身体内部组织硬度的细微差异,可为早期诊断提供触觉线索。
对于应用前景,团队保持着开放而务实的态度:“有的方向非常契合,有的则是技术原理的有趣延伸。这也恰恰说明,精细触觉感知蕴藏着无限可能。”
面对未来,团队方向清晰。訾云龙透露,下一步,基础研究将继续向感知滑动、三维力等更复杂的触觉维度深化;而技术转化,则会秉持开放心态,积极寻求与产业界的合作契机。
“现在正是带着我们‘能做什么’的明确答案,去与市场对话的好时机了。”
来源丨HKUST(GZ)
采访支持丨可持续能源与环境学域




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
