10.1016/j.cej.2026.174954
引用格式:
Li Y, Li N, Wang H, Rao X, Liu H, Jiang Y, Zhang W, Xiao Y, Tian Y, Fan L, Tian J. Neuro-inspired tactile system for robotic embodied perception. Chemical Engineering Journal 2026; 534:174954. https://doi.org/10.1016/j.cej.2026.174954.
深圳大学IPCL课题组联合人工智能与数字经济广东省实验室(深圳)在《Chemical Engineering Journal》期刊上发表了题为“Neuro-inspired tactile system for robotic embodied perception”的研究论文。该论文提出了一种集成多参量触觉传感、神经形态编码与传输以及主观认知框架的类神经感知系统,旨在利用仿生感知策略增强机器人对现实世界物理属性的感知与理解能力。
01论文摘要
理解真实世界的物理属性是实现机器人具身智能的先决条件,这亟需先进的类人触觉传感技术的支撑。大规模触觉传感阵列作为提升空间分辨率和测量精度的必要工具,其面临着难以克服的可扩展性瓶颈,即严重的信号串扰以及冗余的数据采集系统。相比之下,生物触觉系统能够同步且高效地传输并处理来自多种功能感受器的刺激信号。为弥补这一技术鸿沟,本文提出了一种神经启发式触觉系统,该系统集成了多参数传感、神经形态编码与主观认知框架,构建了完整的“感觉-感知-决策”通路。具体而言,本研究设计了一种高回弹气凝胶/海绵复合结构,不仅具备高灵敏度(7.54 kPa−1)和出色的循环稳定性,还实现了自解耦的热传感能力(0.1 K分辨率;灵敏度为20.85 μV·K−1)。结合高灵敏度(21.86 kPa−1)的增韧导电薄膜,该传感单元可实现 1.3 ms 的超快响应。通过将上述核心传感器与空间频率编码电路整合至不同的空间层级,以模拟生物脊髓触觉神经的传输机制,本研究有效模拟了快速适应、慢速适应以及热感受器的典型脉冲放电动力学特征,并实现了信号可分离的总线传输。最后,本文引入了由大语言模型驱动的迭代认知框架,该框架通过综合分析多模态数据,实现了对物体顺应性、粗糙度和隔热性等物理属性的精准解析,并建立了与用户主观感知相一致的个性化分类标准(准确率达 94%)。实际应用测试表明,这种全局仿生设计赋予了机器人提取丰富多模态信息的敏锐感知力,为其深入理解现实世界的物理属性奠定了基础。
Comprehension of real-world physical properties is a prerequisite for robotic embodied intelligence, crucially supported by advancing human-like tactile sensing. Though large-scale tactile sensing arrays are indispensable for improving resolution and accuracy, they are hindered by insurmountable scalability barriers—signal crosstalk and the overwhelming redundancy of data acquisition systems. In contrast, biological tactile perception systems can simultaneously and efficiently transmit and process stimuli from multiple receptors with distinct functions. To bridge this gap, we report a neuro-inspired tactile system integrating multiparametric sensing, neuromorphic encoding, and a cognitive framework to construct a complete sensation–perception–decision pathway. Specifically, we engineer a high-resilience aerogel/sponge composite structure featuring high sensitivity (7.54 kPa−1) and exceptional cyclic stability, along with self-decoupling thermal sensing (0.1 K resolution; 20.85 μV·K−1sensitivity). This is paired with an ultrasensitive (21.86 kPa−1) toughened conductive thin film offering an ultrafast response (1.3 ms). By integrating these core sensors and spatial frequency encoding circuits into distinct spatial hierarchies to mimic the mechanism of the biological spinal tactile nerves, we realize signal-separable bus transmission and effectively emulate the typical firing dynamics of fast-adapting, slow-adapting, and thermal receptors. Finally, a large language model-driven iterative model is introduced, which synthesizes multimodal data to achieve nuanced comprehension of physical properties (compliance, roughness, and thermal insulation) and establish personalized classification criteria aligned with subjective user perception (94% accuracy). Real-world applications demonstrate that this holistic biomimetic design endows the robots with sensory acuity to extract rich multimodal information, laying a foundation for enhancing their understanding of physical properties.
03研究方法
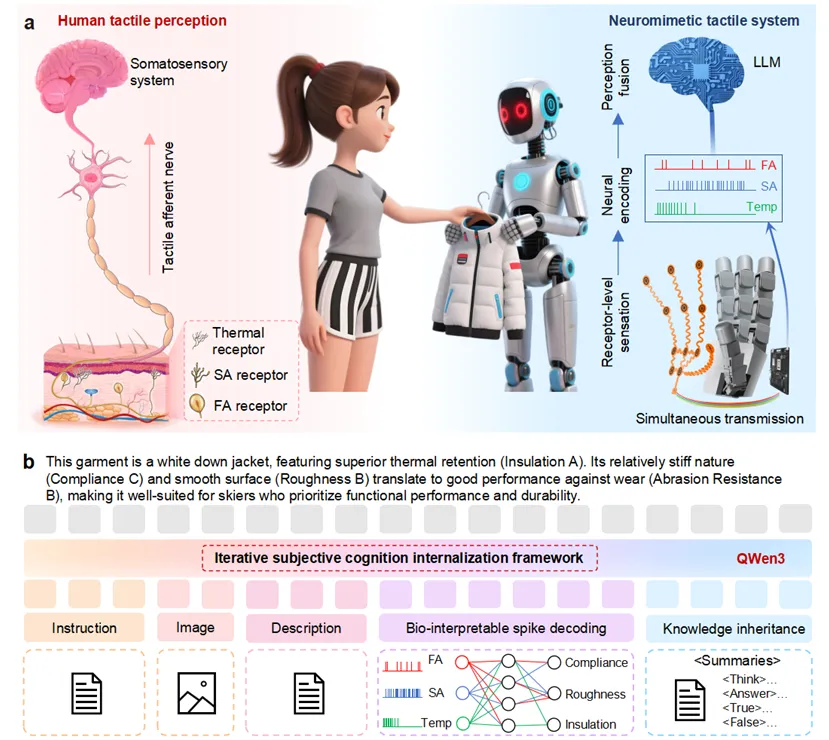 图1 具有神经形态的仿生触觉感知系统
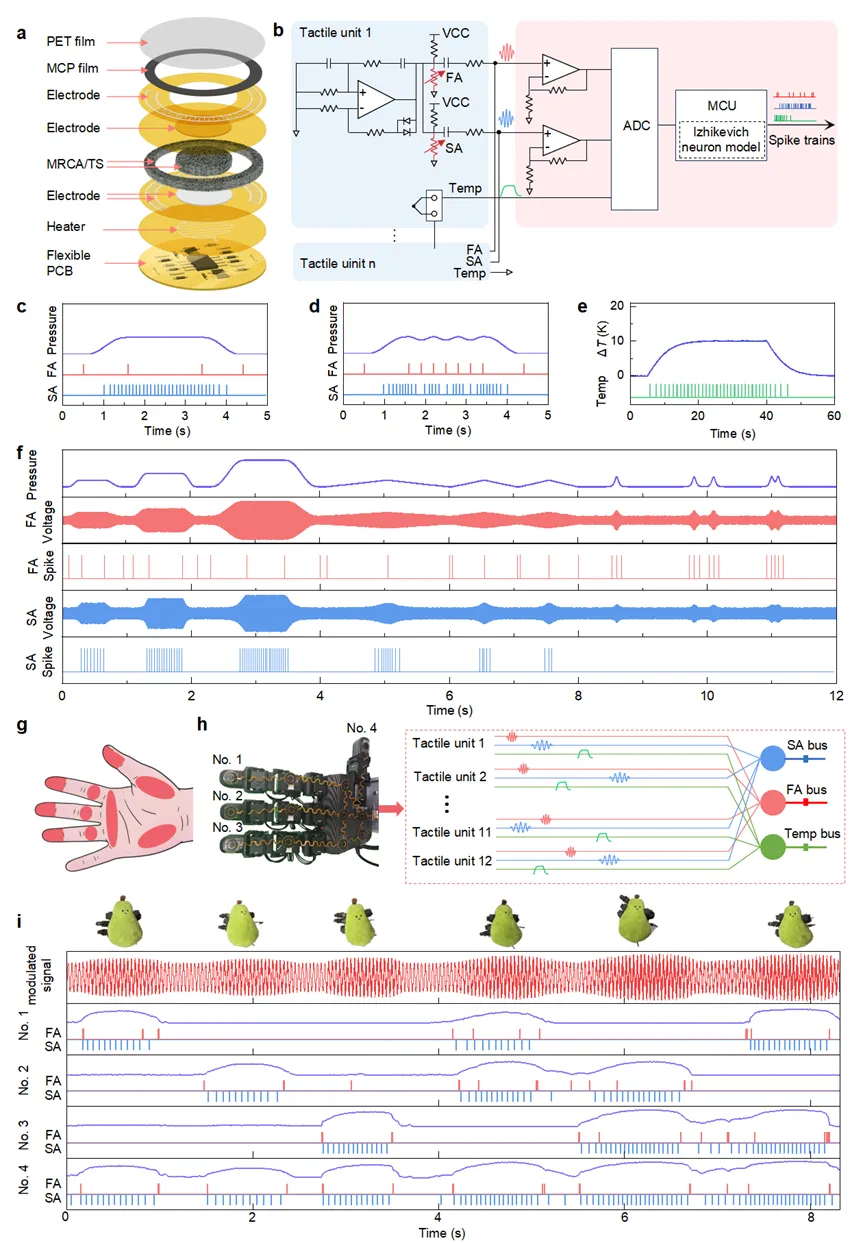
图1 具有神经形态的仿生触觉感知系统本文设计的核心思路是构建一个高度模拟人类触觉感知通路的神经形态系统,完整重构了从“感受器级感觉”、“神经编码”到“感知融合”的类人决策架构(图1)。首先,在感受层面,系统设计了多参数触觉传感器阵列,用于敏锐捕捉外部环境的动态压力、静态压力及热刺激,从而将机械和热刺激转化为底层触觉电信号。其次,在传输与编码层面,系统利用 Izhikevich 神经元模型,将上述多参数触觉信号转化为差异化且具有生物学可解释性的时空脉冲序列,并进行总线传输,以此精确复刻生物周围触觉神经的信号传递机制。在认知与决策层面,系统设计了由大语言模型驱动的迭代主观认知内化框架,对传入的多模态信息(触觉脉冲、视觉图像、文本描述)进行综合评估。其主要功能是将提取的物体客观物理属性(顺应性、粗糙度与隔热性)与用户主观偏好相结合,从而在统一的框架下完成客观物理数据与主观认知评估的整体融合,最终实现复杂任务下的个性化类人决策。
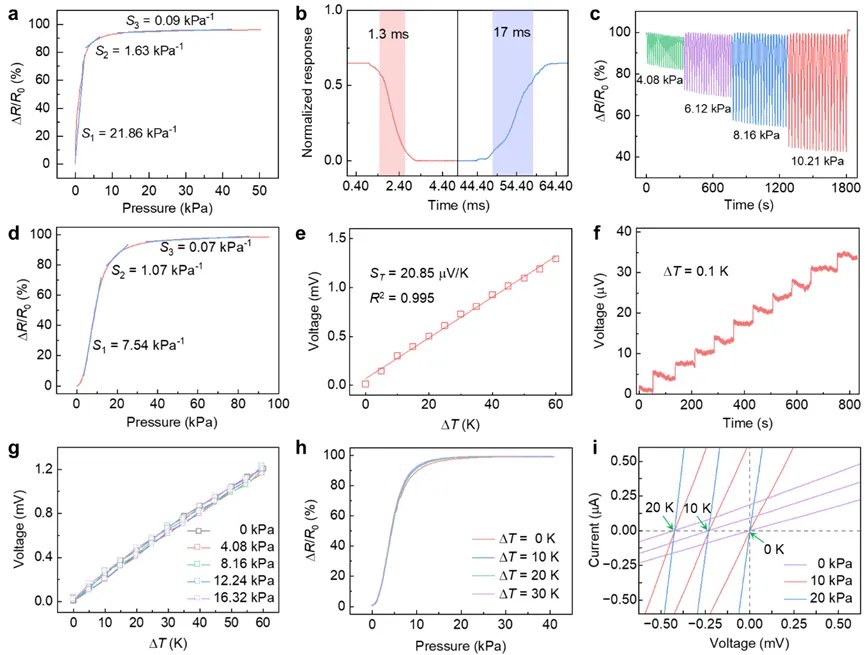
图2 多参数触觉传感器的性能表征
仿生多参数触觉传感器件的设计(图2):本文设计了两种核心传感单元以模拟皮肤中功能不同的机械感受器。采用真空过滤法制备的 MXene/CNF/PS (MCP) 复合薄膜,用于模拟快速适应(FA)感受器检测高频振动,其在 0-4 kPa范围内具有21.86 kPa−1的高灵敏度,响应时间仅为 1.3 ms。同时,构建了MXene/rGO/CNF 气凝胶与 TPU 海绵(MRCA/TS)嵌套复合结构,用于模拟慢速适应(SA)和热感受器,不仅在 0-20 kPa 范围内表现出高度线性的压力响应和出色的力学循环稳定性,还通过塞贝克效应实现了稳定的温度梯度检测(0.1 K温度分辨率;灵敏度为 20.85 μV·K−1),并成功实现了静态压力与热刺激的自解耦。
神经形态信号编码及传输机制(如图3所示):系统在模拟人手抓握时的关键接触区域布置12个传感单元构成阵列,并引入了空间频分复用(SFDM)技术。通过为不同空间位置分配独立的载波频率,多通道信号可以在三条总线(FA、SA、Temp)上叠加并无干扰传输,有效降低了传统大规模触觉阵列的布线复杂度。接收端提取并分类各通路信号后,利用 Izhikevich 神经元模型,通过配置不同的动力学参数,将 FA、SA 和热响应信号分别编码为三种差异化且具有生物学可解释性的时空脉冲序列。
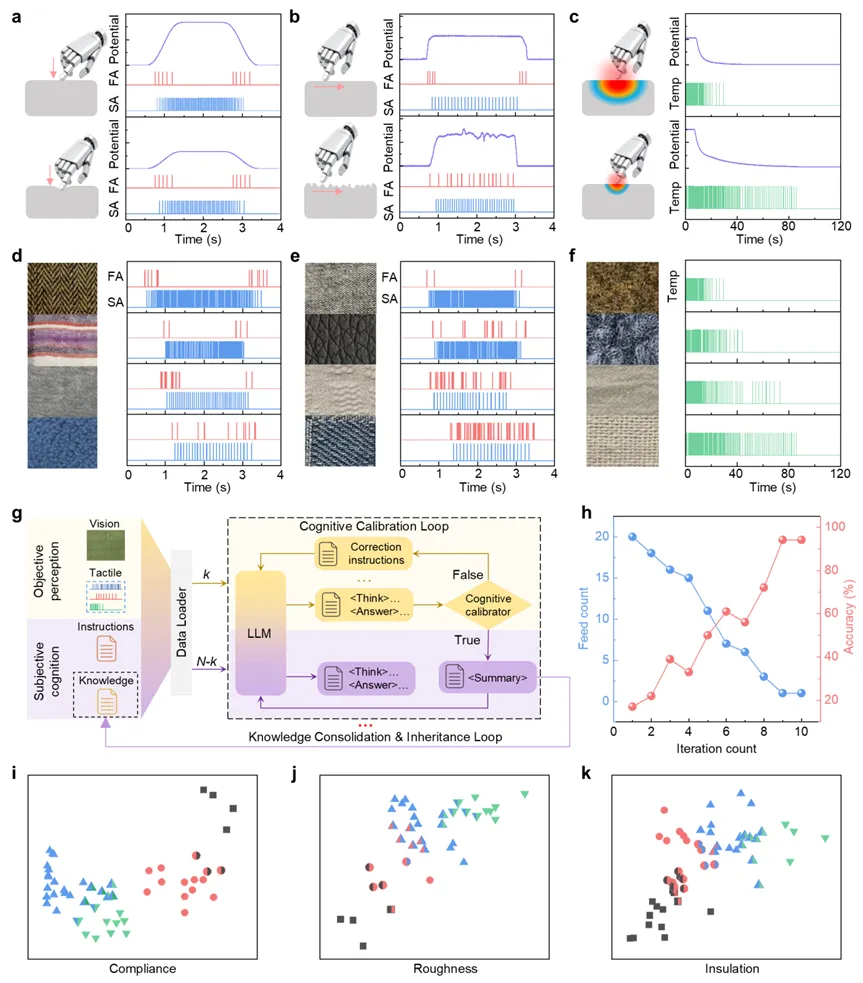
图4 多模态物理属性与迭代主观认知内化框架
多模态物理属性的高精度提取与迭代主观认知内化框架(图4):机器手针对 38 种不同织物执行了特定的探索性动作以解耦物理属性。通过“按压-保持-释放”获取顺应性,“接触-滑动-释放”识别粗糙度,以及“接触-保持-释放”评估隔热性能。采集到的触觉脉冲序列在不同物理属性的样本间展现出了显著的异质性。此外,提出了一种大语言模型驱动的迭代主观认知内化框架。该框架基于人类专家反馈的嵌套强化学习循环,将从脉冲序列中提取的触觉特征与视觉图像、语义描述对齐融合。经过多轮专家反馈与共识建立,ISCIF 框架展现出明确的学习曲线,对人类校准的需求逐渐降低。在 180 次独立验证测试中,该系统实现了 94.4% 的分类成功率。系统将传统 LLM 的黑盒推理转化为显式可控的指令事件,并结合用户主观认知建立个性化的物理属性认知。
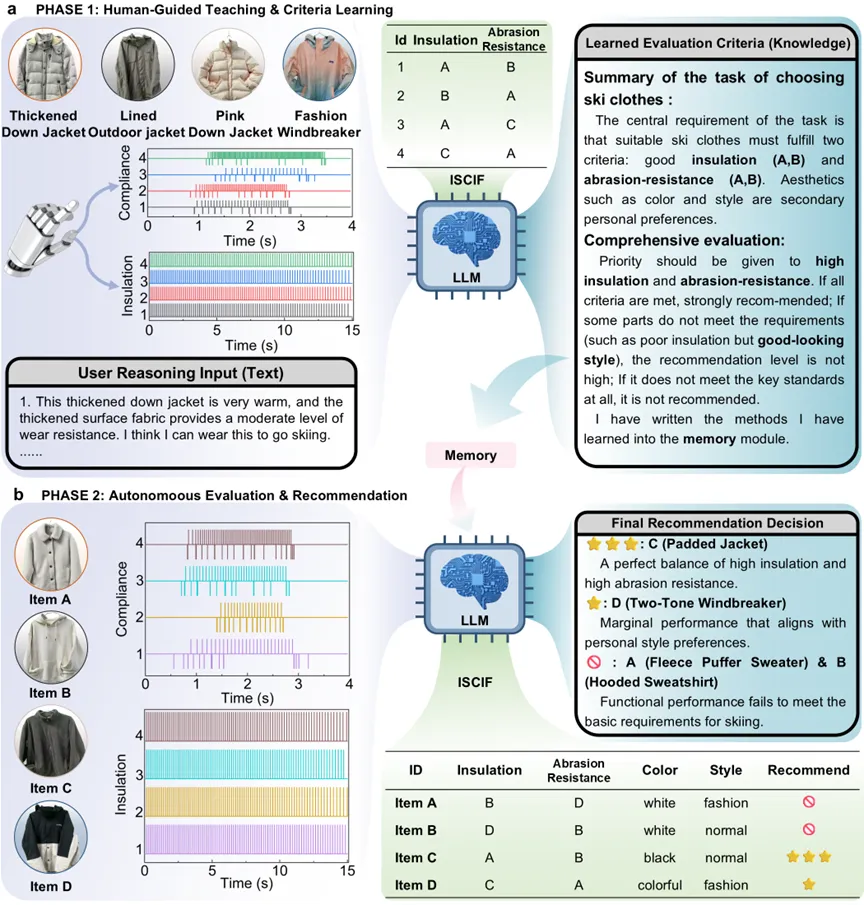
图5 具身认知在现实任务中的应用演示
机器人具身决策场景的应用案例(图5):在滑雪服装挑选的开放场景任务中,机器人展现了模拟人类整合多维信息的决策能力。系统能够自主分析人类先验经验并提取核心评价标准(如极高的隔热性与耐磨性需求),并通过多参数触觉传感系统对目标服装进行多属性评估。最终推荐不仅能满足必备功能需求的衣物,还能敏锐捕捉并权衡美学特征等主观偏好,成功实现了“属性-功能-偏好”策略在真实世界任务中的应用验证。

李熠阳(第一作者),深圳大学博士研究生,研究方向为多模态触觉传感器、电子皮肤以及智能感知系统。

范霖(通讯作者),深圳大学专职副研究员,主要从事智能传感器、机器人电子皮肤与可穿戴技术研究。
深圳大学智能感知与控制实验室(IPCL),依托于深圳大学物理与光电工程学院/智能光测研究院,以及人工智能与数字经济广东省实验室(深圳)(简称光明实验室),面向绿色能源、智能制造等领域的世界科技前沿和国家重大需求,专注于光、声、电、力、热等多物理场智能感知与控制技术及其创新应用研究。现有教师及专职科研人员9人,博士后、研究生及工程师50余人。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
