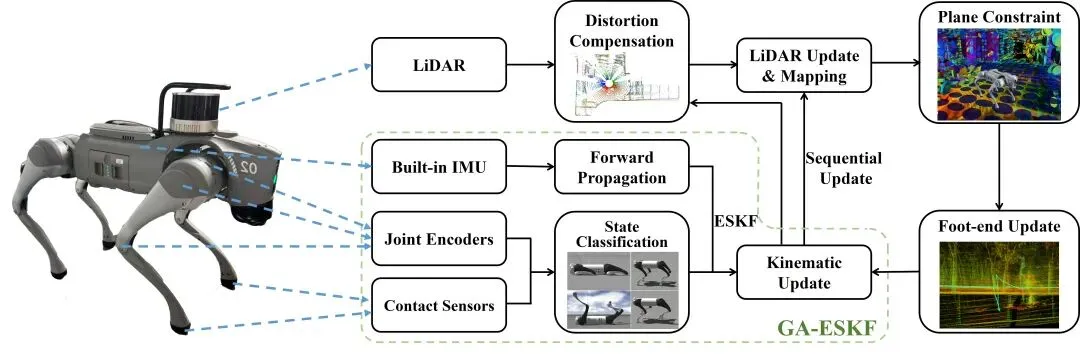
本研究受国家自然科学基金(42571483)、广东省基础与应用基础研究基金(2025A1515011725)、深圳市科技计划资助(JCYJ20240813142833044)及教育部学科突破先导项目共同资助。
原文信息:Zhao, X., Zhang, X., Ni, Y., Li, Q., Zeng, W., Feng, H., Zhou, Y., 2026. Gait-Aware quadruped 3D mapping in challenging environments with complex terrain. ISPRS J. Photogramm. Remote Sens. 233, 664–688. https://doi.org/10.1016/j.isprsjprs.2026.02.010